
A
vezérlő első
sorban BIGRAS forgatókhoz készült, de használható egyéb impulzus
visszajelzést használó forgatókhoz is. A függőleges forgatást
kikapcsolva RAK vagy BIGRAK forgatók teljes körű használata is
lehetséges. A firmware kismértékű
átalakitása esetén analóg visszajelzéssel is hasznalható (YAESU).
A
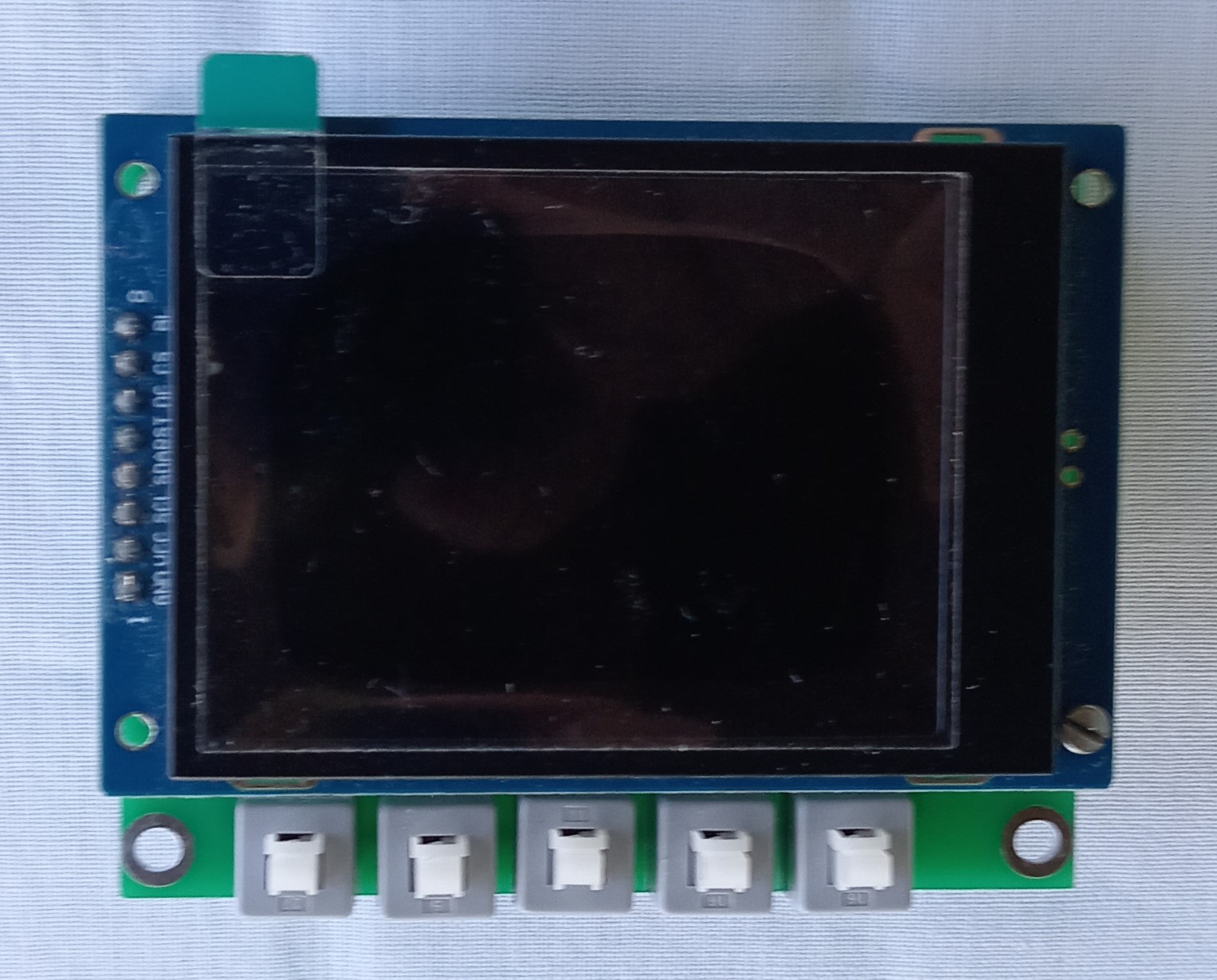
vezérlőhöz három méretű kijelző használható. A képen látható 1.9"-os,
valamint 2.4" és 2.8" méretű. Fontos, hogy a kijelzőben ST7789 tipusú
csip legyen.
Elérhető funkciók:
A vezérlő négy módon irányitható. A lapon lévő két USB csatlakozó közül az egyik natív USB 1.1 tipusú, ennek sebessége 12 Mbps. A másik USB port egy USB-UART átalakitó, ennek átviteli sebessége fix 115200 Bd. Ezen kívül használható standard RS232 COM port egy TTL-RS232 átalakitón keresztül. Ennek a sebessége 300 és 230400 Bd között állítható. Megfelelő program esetén lehetőség van antennát WiFi-n keresztül is vezérelni. Az említett lehetőségek akár egyszerre is használhatóak. A beállítások szintén elérhetőek vagy egyenesen a vezérlőből, soros porton keresztül, vagy WiFi-n, amikoris a megfelelő weblapot megnyitva tudjuk megváltoztatni a beállításokat. A vezérlő főbb parancsai a Yaesu GS232-vel kompatibilisek, így szükség esetén azt kell kiválasztani. A teljes parancskészlet a soros porton keresztül a H paranccsal érhető el. A Yaesu parancsokon kívül értelmezni tudja a FOXDELTA tipusú parancsokat, valamint a standard NMEA tipusú GPGGA üzeneteket is. Ha előtte beállitottuk a saját koordinátáinkat, akkor az üzenetekben lévő adatok alapján kiszámitja az adott ponthoz tartozó azimutot és elevációt, majd az antennát az adott pont irányába forditja. Ez a funkció elsősorban magaslégköri ballonok követésénél használható (például a SondeMonitor nevű programnak van ilyen kimenete, így ez a program egyenesen tudja forgatni az antennát). A vezérlő továbbá tudja emulálni a PSTRotator és rotctld programokat is. Így ha valamelyik általunk használt programban a forgató vezérlése csak PSTRotator vagy rotctl protokollal lehetséges (pl. SatDump, Horus), elég beállítanunk mindkét helyen a megfelelő portszámot, és a használt programban a vezérlő IP címét, amit a Menu ablak bal felső sarkában látunk. Természetesen szükséges, hogy föl legyünk csatlakozva a WiFi hálózatra.
Leírás:
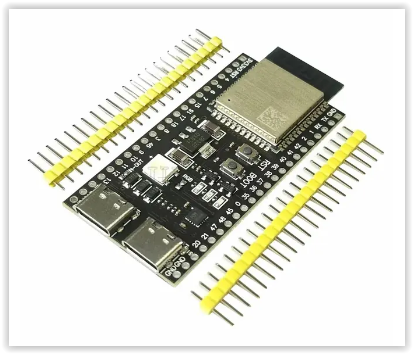
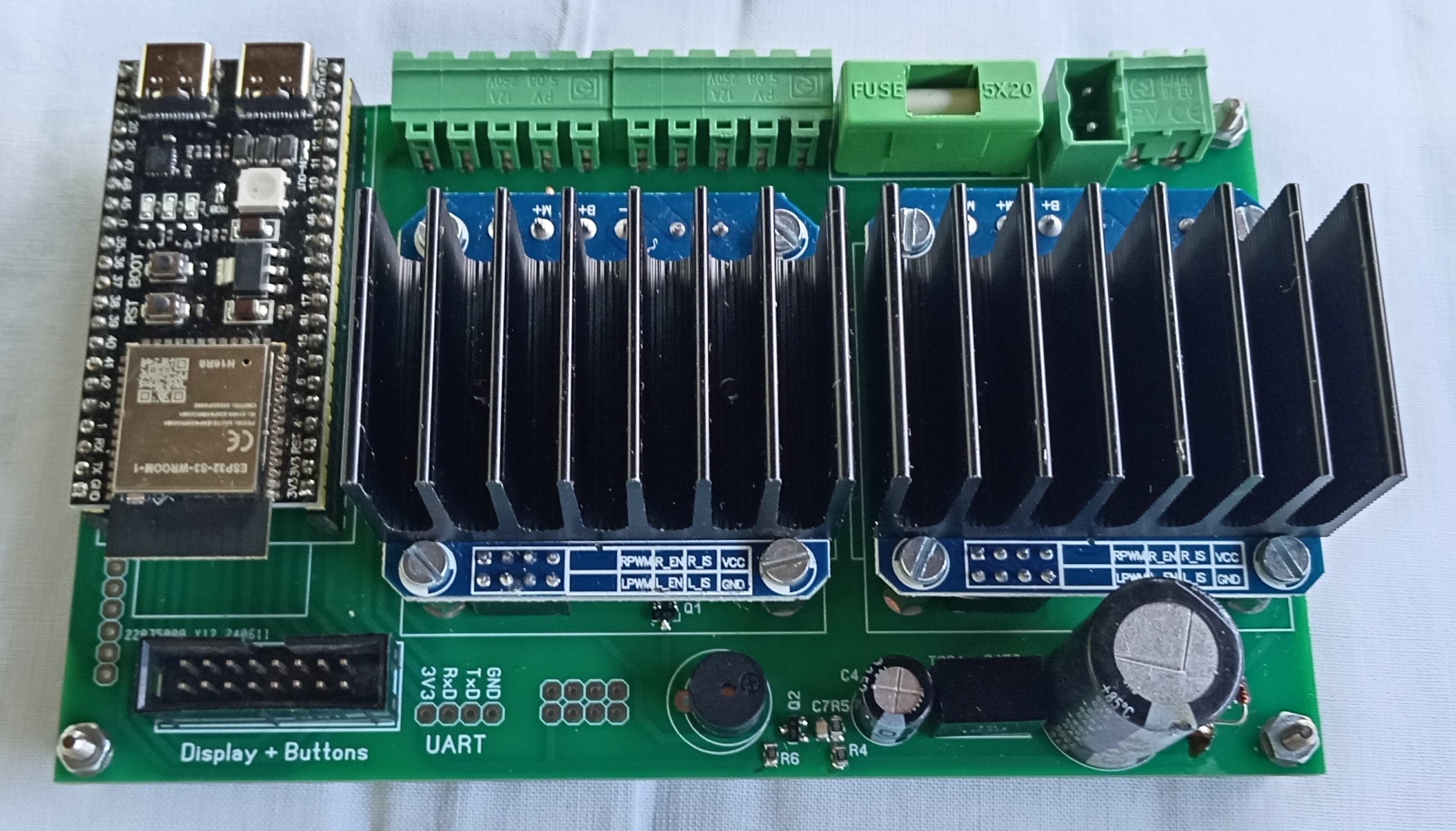
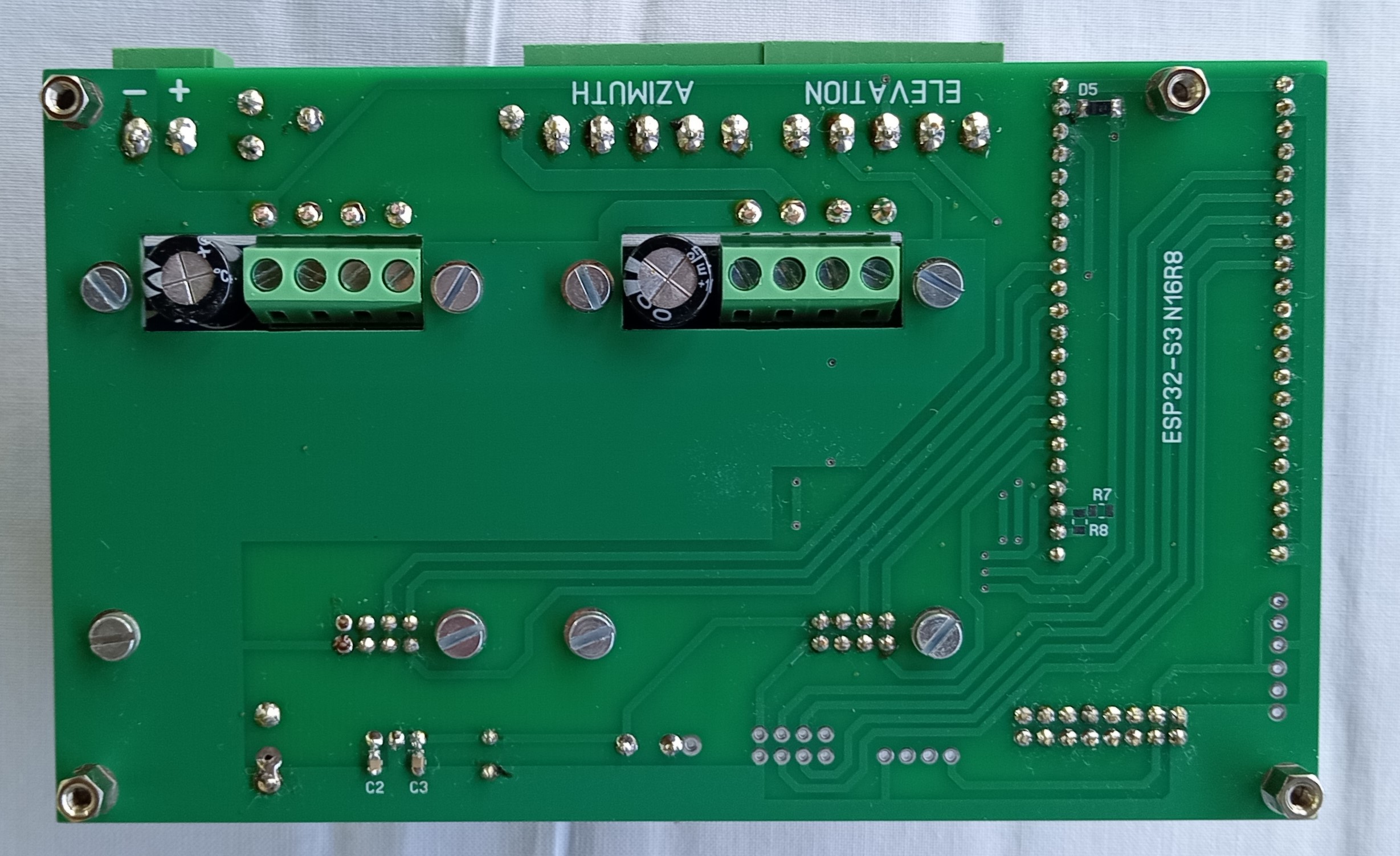
A vezérlő áramkör központi eleme egy ESP32-S3 N16R8 tipusú modul. A képen látható modult szerezzük be, mert van forgalomban olyan változat is, amelyiknél a nyomógombok közvetlenül az USB csatlakozók fölött vannak. Ez a modul azonban 2,54 mm-rel keskenyebb, így az a tüskesor elhelyezkedése miatt nem fog illeszkedni a NYÁK-ba. Egyes gyártó egy betöltött demo programmal árulja a modult, amely bekapcsolás után villogtatja a modulon lévő LED-et. Ha ilyent sikerült beszerezni, akkor bontani kell a modulon lévő RGB jelű rövidzárat. Az RGB led mellett található egy másik rövidzár IN-OUT felirattal. Ezt rövidre kell zárni! A modulban egy uPython interpreter fut, ami értelmezi és végrehajtja a pythonban írt kódot. Az elkészítés egyszerűsítése érdekében magának a motornak a vezérlésére is egy kész, IBT_2 tipusjelzésű modul lett alkalmazva. A kijelző és a nyomógombok egy külön kis panelen kaptak helyet. Mivel a COM csatlakozások már kifutóban vannak, ezért nem lett volna ésszerű ezt ráintegrálni a nyomtatott lapra, de szükség esetén ez a modul is külön csatlakoztatható. A kijelző paneljén 5 nyomógomb található. Ezek funkciója az éppen aktuális helyzettől függ. Hogy melyik nyomógomb éppen mire szolgál az a kijelző legalsó sorában van feltüntetve. Ha a vizszintes és függőleges forgatás is aktív, akkor a balról jobbra haladva: antenna le, antenna föl, stop vagy menü, antenna balra (az óra járásával ellentétes irányban), antenna jobbra (óra járásával megegyező irányba). Ha csak a vízszintes forgatás aktív, akkor a bal szélső gomb a balra fordulás, jobb szélső gomb a jobbra fordulás, a középső gomb a stop vagy menü. A második és negyedik gombnak nincs funkciója.
A továbbiakban leírt funkcióknak használata csak a kényelmet szolgálja, nincs hatással a vezérlő fő funkcióira. Beszerelésük nem feltétlenül szükséges:
A P1 és P2 potencióméterekkel egyszerűbben fordítható az antenna a kívánt pozícióba úgy, hogy a potencióméterrel beállítjuk a kívánt irányt majd az SW7 gombot megnyomva az antenna vízszintes, míg az SW8 gombot megnyomva függőleges irányban áll be a kiválasztott pozícióba. Használhatunk egy közös potenciómétert a vízszintes és függőleges irányra, vagy külön potenciómétert a vízszintes és külön a függőleges irányra. Ha a rotor_s3.cfg állományban a pot paraméter értéke 1, akkor egy közös potenciómétert feltételez, ha az érték 2, akkor ez azt jelenti, hogy két külön potencióméter van. Mivel ezt a paramétert használat közben nem változtatjuk, ezért ez a paraméter csak manuálisan írható át egy szövegszerkesztővel az előbb említett állományban, vagy a weblapon keresztül. A harmadik nyomógomb (SW9) megnyomására az antenna a menüben beállított parkolási pozícióba áll be. Hogy a potenciómétereket ne kelljen kalibrálni, az SW10 megnyomásakor a kijelzőn a potencióméterekkel beállított pozíció jelenik meg. Így a potencióméterek forgatásánál látjuk, hogy az SW7 vagy SW8 megnyomásakor hová fog fordulni az antenna.
Az antenna forgatásához használható főbb parancsok:
Waaa eee - fordítsd az antennát vízszintesen az aaa, függőlegesen az eee irányba
A - azimuth állj
AZ=aaa - forditsd az antennát vizszintesen aaa irányba
AZ=aaa EL=eee - forditsd az antennát vizszintesen az aaa, függőlegesen az eee irányba
E - eleváció állj
EL=eee - fordítsd az antennát függőlegesen az eee irányba
S - minden állj
Maaa - forditsd az antennát vízszintesen aaa irányba
Keee - fordítsd az antennát függőlegesen az eee irányba
ML - fordítsd az antennát az óra járásával ellentétes irányban
MR - fordítsd az antennát az óra járásával megegyező irányban
MU - fordítsd az antennát felfelé
MD - fordítsd az antennát lefelé
L - fordítsd az antennát az óra járásával ellentétes irányban
R - fordítsd az antennát az óra járásával megegyező irányban
U - fordítsd az antennát felfelé
D - fordítsd az antennát lefelé
C - az antenna pillanatnyi helyzete vízszintes irányban
C2 - az antenna pillanatnyi helyzete vízszintes és függőleges irányban
B - az antenna pillanatnyi helyzete függőleges irányban
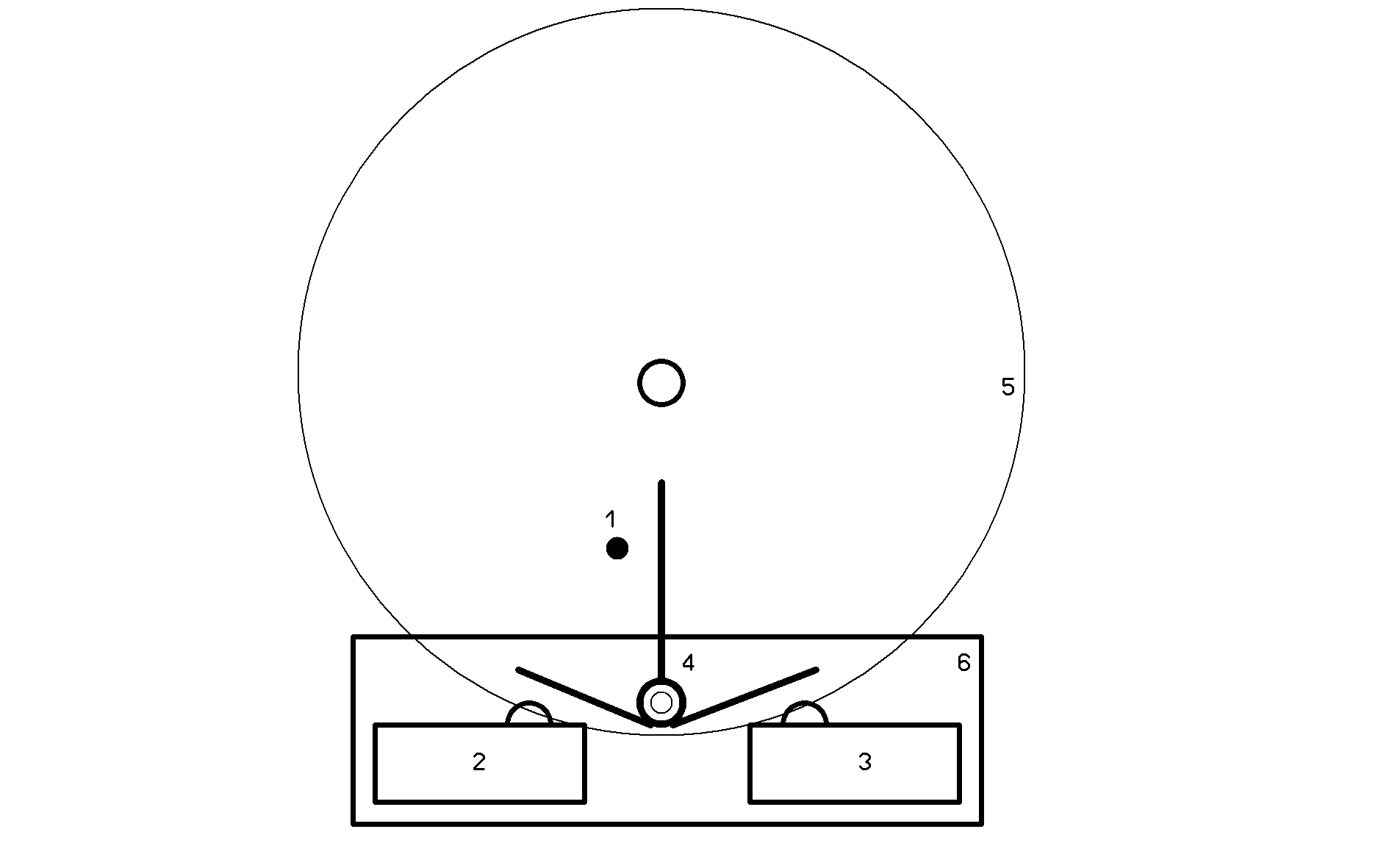
Ahhoz hogy az antenna kalibrálása megfelelően működjön, a forgató-mechanikába be kell épiteni egy végkapcsolót, ami a forgást vizszintes irányban a kezdő pozicióban leállitja. Ilyen végállás-kapcsoló a függőleges irányban eredetileg is be van épitve, de vizszintes irányban - számomra érthetetlen okokból - nincs, igy azt nekünk kell pótolni. Gondolom senki sem szeretné ha a koaxkábele azért szakadna el, mert föltekeredett az antennára. Ezt nem túl nehez megoldani, de egy kis kreativitás kell hozzá annak alapján hogy kinek milyen eszközök és végkapcsolók állnak a rendelkezésére. Arra minden esetben vigyázzni kell, hogy a kapcsoló csak az egyik irányban legyen aktiv. Egy lehetséges megoldást ez a kép szemléltet. Ezen:
{kind=link}
1 - függőleges pálca a fogaskeréken
2,3 - végkapcsolók
4 - lemezből kialakitott kar a végkapcsolók kapcsolására
5 - fogaskerék
6 - segéd panel amelyre a kar tengelye és a végkapcsolók vannak szerelve
Ennek a megoldásnak az az előnye, hogy mindkét irányban van végkapcsoló, és a lemezkar megfelelő beállitásával elérhető a szükséges túlfordulás. Az antennát úgy rögzítsük a forgatón, hogy mindkét végén kölülbelül egyforma legyen a túlfordulás. Ilyenkor az óra járásával ellentétes irányban lévő túlfordulás értékét írjuk be amenüben az "azimuth offset" értékének.
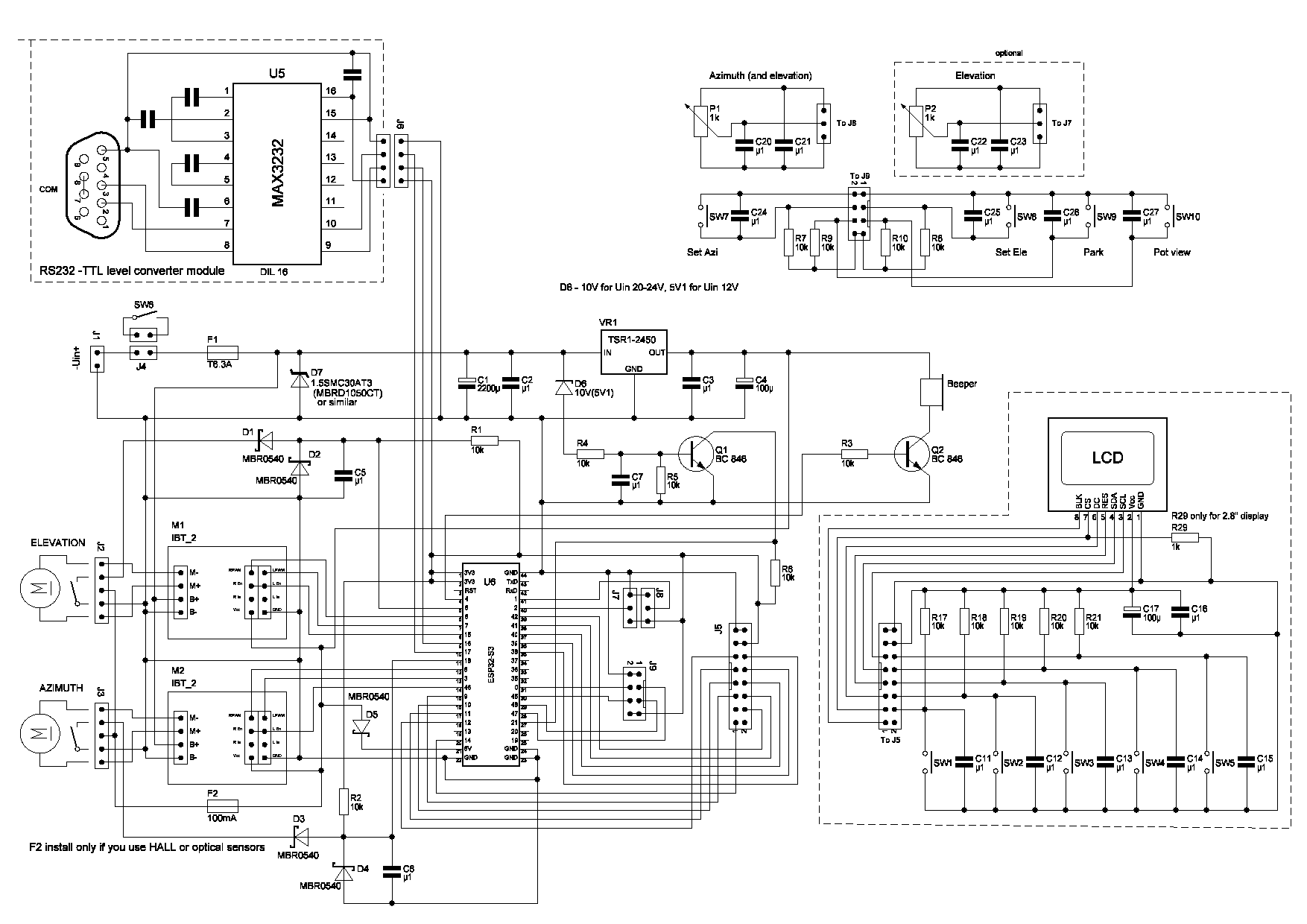
A bekötési rajz:
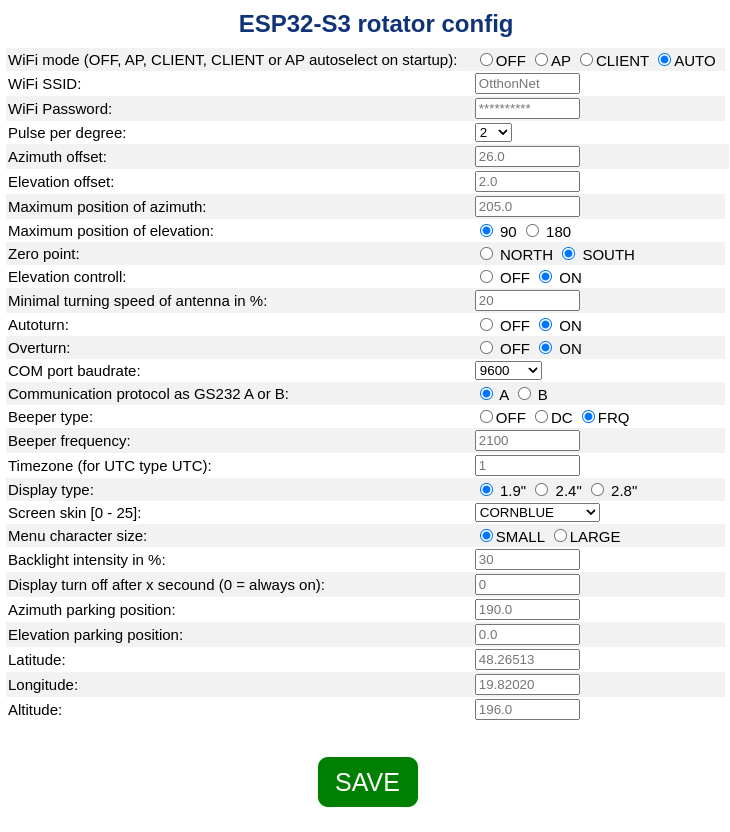
Beállítások:
A legfontosabb paramétereket a menüben érhetjük el. Ide a középső gomb (STOP) hosszú idejű megnyomásával jutunk. Ilyenkor egy többsoros menü jön elő amiben görgetéssel (UP, DOWN) juthatunk el a megfelelő menüpontra. Ezek a következők:
AZ turn to: itt beállíthatjuk, hogy vízszintes irányban hova forduljon az antenna, ha kilépünk a menüből
EL turn to: itt beállíthatjuk, hogy függőleges irányban hova forduljon az antenna, ha kilépünk a menüből
Pulse/degree: itt állíthatjuk be, hogy a forgató hány impulzust ad 1 fok elfordulasára
Azim offset: hány fokra van az antenna nullpontja a baloldali végállástól
Elev. offset: hány fokra van a vízszintes állás a végkapcsolótól
Max. azimuth: az antenna poziciója felső végállásban
Max. elevat.: a megengedett maximális eleváció az antennarendszer függfényében (90 vagy 180 fok)
GS232: A vagy B, az szerint hogy melyik tipust emulálja
Beeper type: ha az érték OFF akkor a csipogó ki van kapcsolva, nem ad hangjelzést ha a soros porton parancs érkezik, DC - aktív csipogó esetén, vagy szám, ami a csipogó frekvenciáját jelenti. Értéke 200 és 5000 között lehet.
Elevation: ON vagy OFF, ha a forgató nem alkalmas a fuggőleges forgatásra, ezt a paramétert állitsuk OFF-ba
Overturn: ON vagy OFF, ha az antenna lehetővé teszi a túlfordulást, akkor ezt a paramétert ON-ba kapcsolva, a forgató a vizszintes irányban az offset és a max. azimuth-al beállitott érték között folyamatosan használható. OFF állapotban csak 0 és 360 között.
Autoturn: ON állapotban ha a CW, CCW, UP vagy DOWN gombot 5 masodpercig nyomva tartjuk, akkor a gomb elegedése után az antenna forog tovabb, amíg vagy ujra megnyomjuk valamelyik gombot, vagy a forgató elér a végállásba
Zero point: ez a paraméter határozza meg, hogy hol van a forgató mechanikai nullpontja, ez lehet déli vagy északi irányban
WiFi: induláskor hogyan viselkedjen a WiFi. Kikapcsolhatjuk, vagy beállithatjuk hogy induláskor próbáljon meg fölkapcsolódani a WiFi hálózatra. Ha ez nem sikerül, akkor kapcsoljon AP-módba.
Backlight: a háttérvilágitás intenzitása
COM baudrate: a soros port sebessége
Menu char.: a menü betűmérete - nagyobb betű jobb olvashatóság, kevesebb sor, vagy kisebb betűk de több sor látható egyszerre
Screensaver: kepernyőkímélő, 0 esetén ki van kapcsolva (a kijelző folyamatosan világít), szám esetén ennyi másodperc után kapcsol ki a kijelző
Display type: a kijelző típusa, 1.9, 2.4, 2.8 col
Minimal turn: A forgató minimális forgási sebessége, aminél az antenna még megbízhatóan forog. Induláskor erről a sebességről gyorsít föl a maximális sebességre, leállás előtt erre a sebességre lassít le, hogy a forgatót ne érjék erős behatások. Ennek köszönhető, hogy műhold követése esetén is folyamatosabb a mozgás.
Background: a kijelzőn használt szinkombinációk
Timezone: állitsd be a saját időzónádat, ha nem UTC-ben akarod látni az időt. (Időeltolódás az UTC és a téli időszámitás között. A nyári időszámítás beállítása automatikusan történik)
Calibrate a forgató pozíciójának kalibrálása. Vízszintes irányban csak a végkapcsolók utólagos beépítésével használható, függőleges irányban a végkapcsoló már gyárilag be van építve
Ha a WiFi SSID és jelszó helyesen van beállitva, akkor a menüablak bal felső sarkában látjuk a kapott IP számot. Ezen az IP számon tudjuk egy böngészőn keresztül elérni a beállitásokat. A jobb felső sarokban látható a firmware verziószáma. Sikeres csatlakozás esetén a kijelző alsó részén megjelenik a pontos idő UTC-ben, vagy helyi időben attól fuggően, hogy a menüben milyen időzóna van beállitva.
A memóriában talalható egy rotor_s3.cfg nevű állomány. Ez tartalmazza a paraméterek beállított értékeit. Ez ugyan egy szöveges állomány, de kézzel való szerkesztését csak annak ajánlom, aki tisztában van azzal, hogy mit csinál. A kézzel való szerkesztés előnyös lehet az SSID és a jelszó első alkalommal való beírasánál, ha nem akarunk első alkalommal a 192.168.4.1 IP számú AP-n keresztül csatlakozni. Az SSID és jelszó beállítasa azonban sokkal biztonságosabb módon is elvégezhető a soros porton keresztül a { és } paranccsal. Ha a vezérlő nem tud csatlakozni a WiFi hálózatra, és ha ez a funkció nincs letiltva, akkor egy AP-t hoz létre, amit vagy a ROTOR-AP SSID-vel vagy a 192.168.4.1 IP címen érhetünk el. Ebben az esetben a jelszó 1234567890. Ha használni akarjuk a WiFi-t, mindenképpen ellenőrizzük le a menüben, hogy a WiFi ON állapotban van-e. Ha nem, akkor kapcsoljuk be. Ilyenkor az automatikus kapcsolódás van érvényben (vezérlőt újra kell indítani, mert csak bekapcsoláskor ellenőrzi a beállítást). Ezt a beállítást majd a weblapon keresztül meg tudjuk változtatni.
A paraméterek beállításának harmadik módja, hogy a soros porton elküldjük a megfelelő parancsokat. A parancsok listáját a H vagy h paranccsal tudjuk lekérni.
Elkészítés:
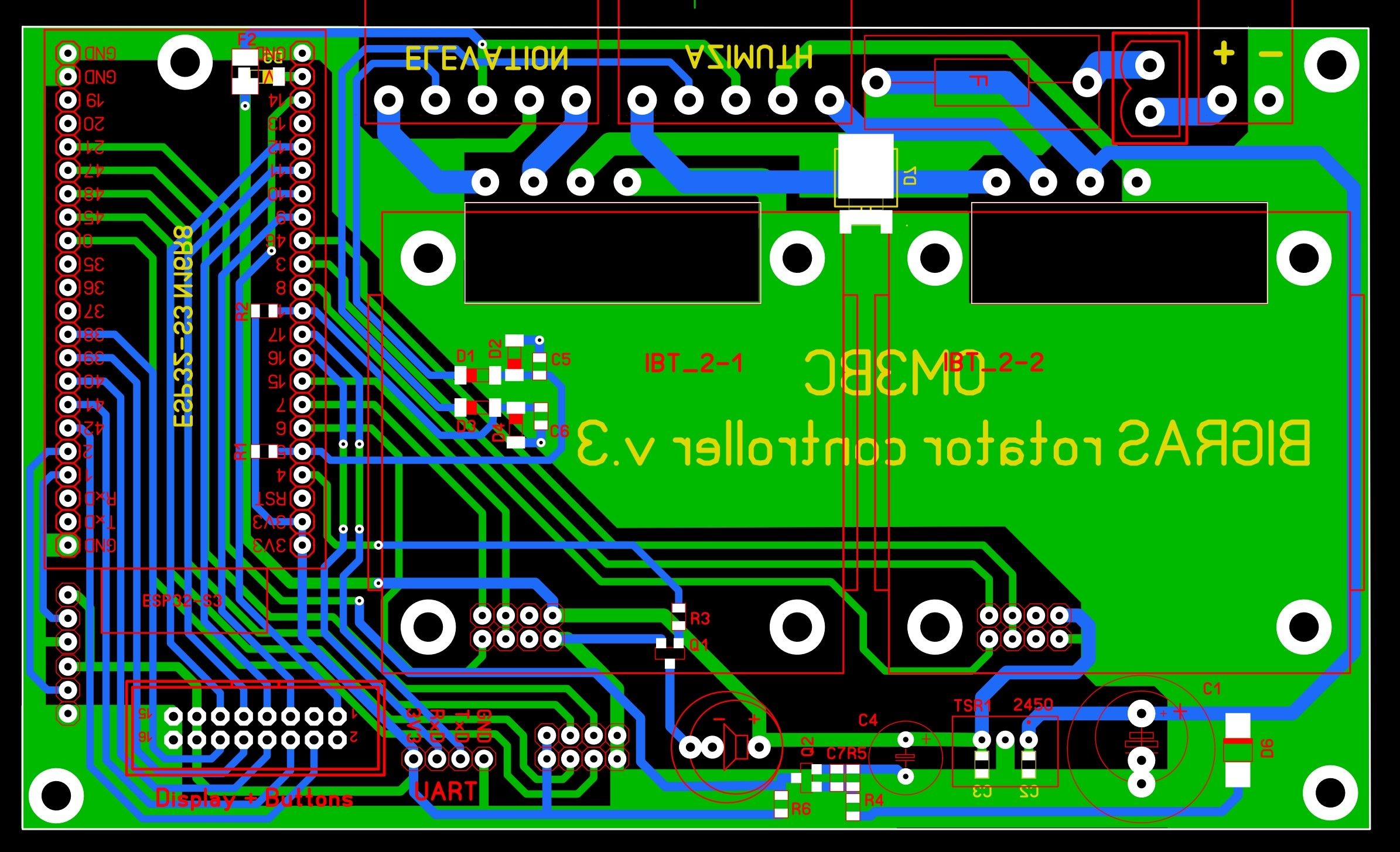
Mint látható a NYÁK meglehetősen egyszerű. Csak néhány alkatrészt és a csatlakozókat tartalmazza. Az alkatrészek beszerzésével sem lehet nagyobb gond, mert minden ellenállás értéke 10 k, a keramikus kondenzátoroké 100 nF. Mindegyik mérete 0805. A zener és védő diódát kivéve az összes dióda shottky.
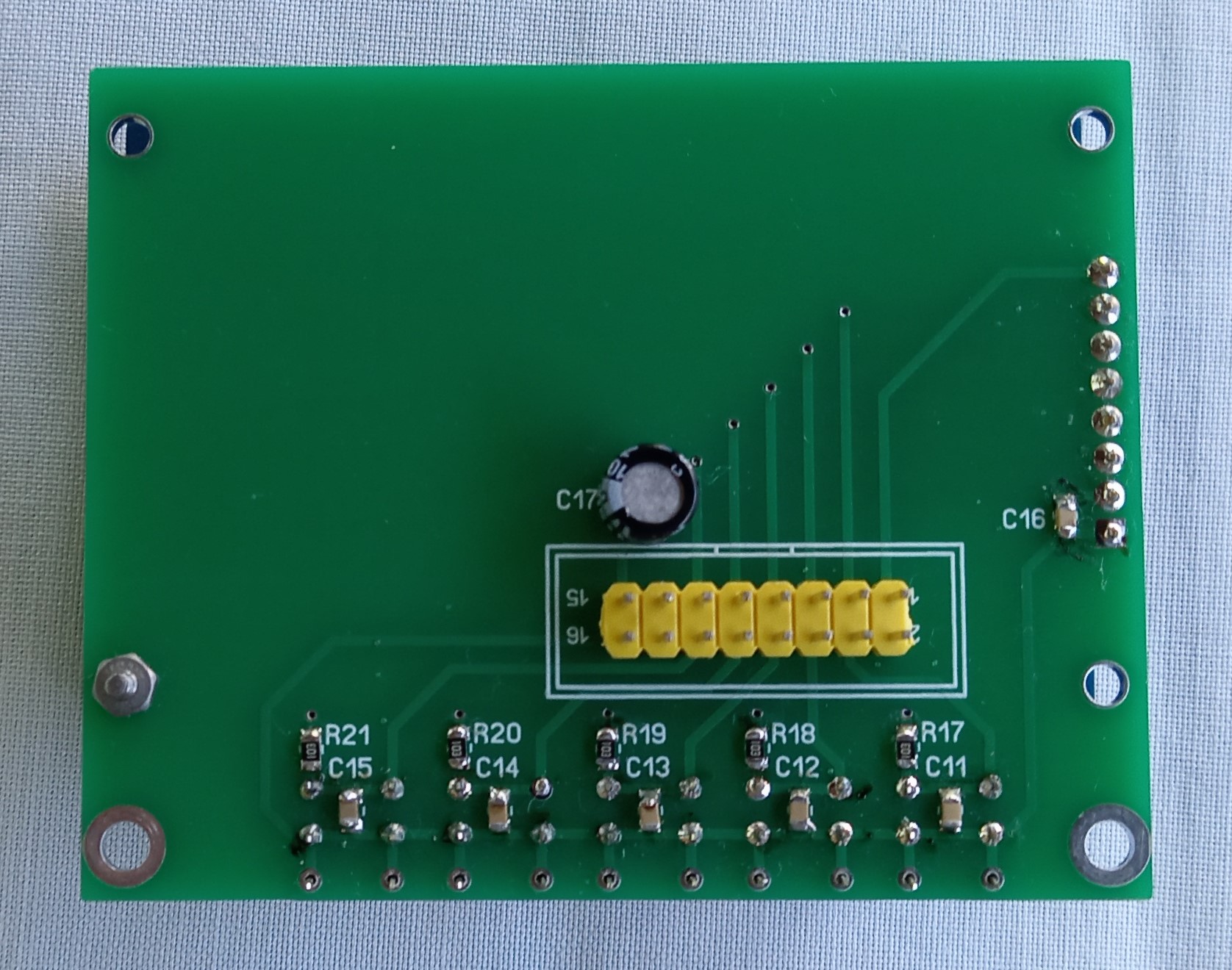
A kijelző és a nyomógombok egy külön panelra kerültek.
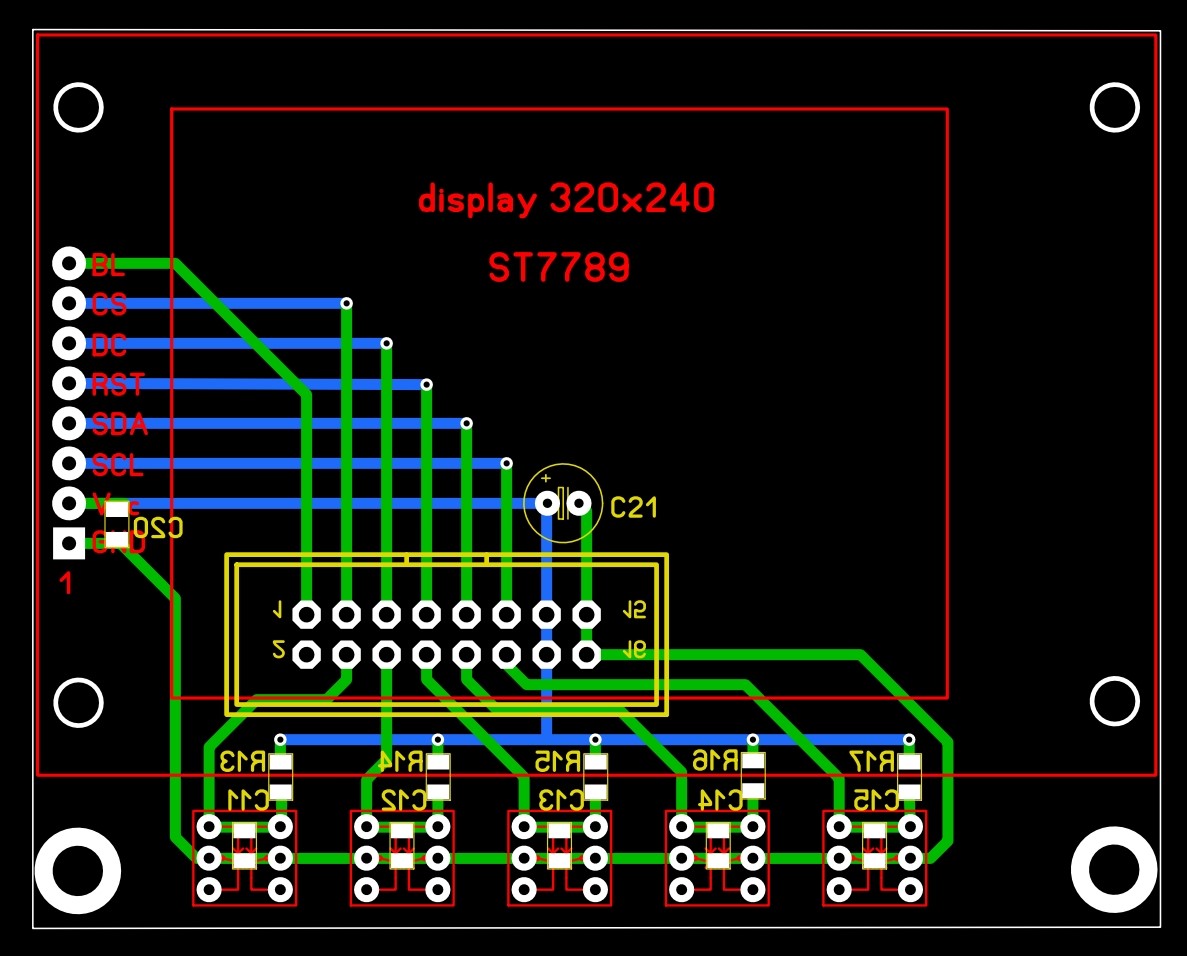
Minden méretű kijelzőnek saját panelja van. Az 1.9 colos kijelző paneljén 5.8x5.8 mm-es, míg a 2.4 és 2.8 colos kijelzők paneljén 8.5x8.5 mm-es nyomógombok vannak.
A NYÁK panelek legyártásához ezek a gerber állományok használhatók:
logika, 1.9display, 2.4display, 2.8display
Ügyeljünk arra, hogy a WiFi antenna a modulon kapott helyet, ezért a vezérlőt vagy műanyag dobozba szereljük, vagy a fém doboz ne legyen túlságosan zárt, hogy a WiFi jel kijusson a dobozból. A hűtés szempontjából amúgy sem lehet a doboz túlságosan zárt.
A vezérlőhöz 3D nyomtatóval keszült doboz 1.9 , 2.4 , 2.8 colos kijelzőhöz.
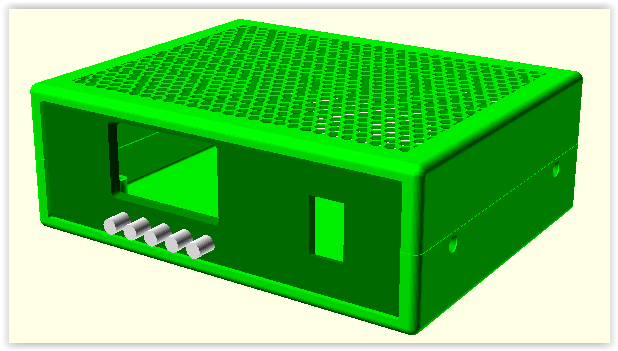
lid_xxh lid_xxv
A tápegység nem része a vezérlőnek. Tápegységnek olyan típust válasszunk, amely elviseli az áramfelvétel hirtelen változásait. Én egy LED-ekhez használatos 24V 10A-es tápegységet használok. Ennek a feszültségét a benne található trimmer segítségével 20V alatti értékre allítottam (a beállítható minimumra). A D6 dióda értéke kritikus. Olyan Zener diódát kell alkalmazni, amelynél kikapcsoláskor az ESP32 - 21 portja (megszakítás) meg időben kerül LOG0 állapotba ahhoz, hogy a processzornak legyen elég ideje elmenteni az aktuális pozíciót, de a motorok indításakor fellépő feszültségingadozás (az áramfelvétel akár 10A is lehet) még ne aktiválja a megszakítást. Ez nagyban függ a tápegység minőségétől.
Telepítés:
Akinek már van gyakorlata a micropython és ESP modul használatával, az töltse bele a modulba a programcsomag tartalmát az általa megszokott módon.
Akinek nincs gyakorlata, vagy először próbálja használni az ESP32 modult, az kövesse az alábbi útmutatót.
1. töltsd le a Thonny nevű programot a megfelelő operációs rendszerre (javaslom a Windows-t használni).
2. alakíts ki egy tetszőleges könyvtárat, ahová bemásolod a következő állományt firmware
Csomagold ki a firmware-csomag tartalmát egy új könyvtárba, pl. ROTOR.
Lépj be a könyvtárba.
Csatlakoztasd az ESP modult a számítógéphez USB-kábellel. Windows rendszerben az "Eszközkezelő" menüben ellenőrizd, hogy milyen portszámot kapott az ESP. Ha a rendszer nem ismeri föl a modult, instaláld a következő drivert CH343SER.
Első lehetőség:
Windows:
nyissd meg az install_upython.bat fájlt
javítsd ki a portszámot (a python3-nak telepítve kell lenni)
mentsd el a fájlt
futtasd a bat fájlt
Linux:
futtasd az sh fájlt: bash install_upython.sh
Második lehetőség:
Tölsd le a programot a uPython betöltéséhez valamint magát uPython programot
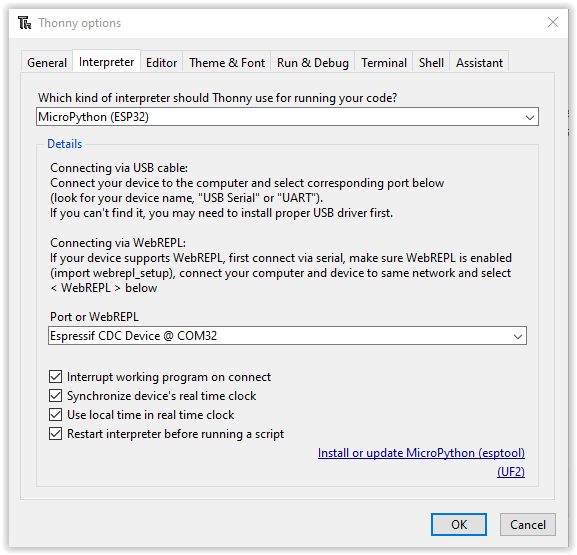
Ha elinditjuk a betöltő programot egy ilyen ablak jelenik meg:
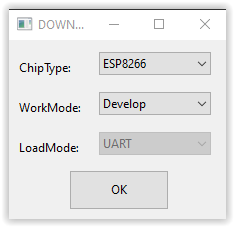
Itt az első sorban válasszuk ki az ESP-S3 lehetőséget, a harmadikban az USB-t:
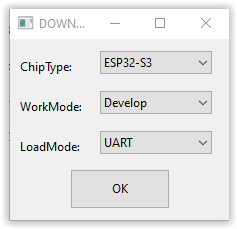
Az OK-t megnyomva előjön maga a program:
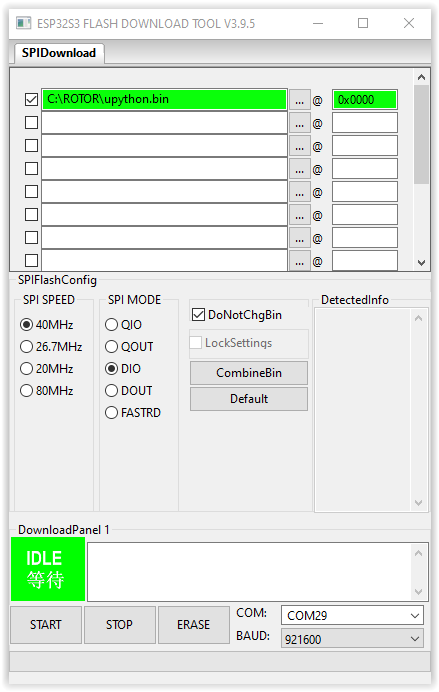
A ... gombbal töltsük be a bin-t, a COM-nál állitsuk be azt a portszámot, amit az ESP kapott. Első lépésként töröljük az ESP memóriájának tartalmát az ERASE gombbal. Ha ezzel végzett (eltart egy ideig), akkor a START gomb megnyomásával töltsük be a uPythont az ESP-be. Ha ez a művelet is sikeres volt, akkor már túl vagyunk a nehezén.
Most már elindíthatjuk a Thonny-t. A Tools - Options menüben állitsuk be a képen láthatókat:
Természetesen a második lehetőségnél a saját modulunk portszámát kell megadni.
A View menüben kiválasztjuk a Files pontot. Ilyenkor a bal oldalon megjelenik egy egyszerűsített filemanager. A felső felében belépünk abba a könyvtárba, ahol a firmware található. A felső ablakban lévő állományokat egyenként átmásoljuk az alsóba (jobbklik - Upload to /). Ügyeljünk, hogy a fonts könyvtárban lévő fontok az ESP-n is a fonts könyvtárba kerüljenek. A jobbklik Upload to / -val az egész fonts könyvtár egyben átmásolható.
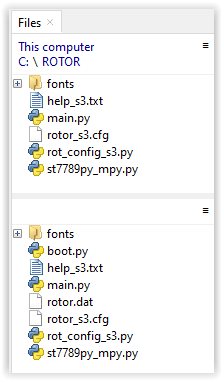
Ezzel a művelettel el is készült a firmware telepítése. Sajnos nekem már előfordult, hogy a másolásnál megsérült az állomány tartalma. Ha az állomány neve mellett nem a képen látható ikon jelenik meg, akkor a másolást meg kell ismételni. Még nem lesz meg a "rotor.dat" fájl. Csak a vezérlő bekapcsolása után jön létre.
alkatrész lista
Elkészült egy változat 4 colos érintőképernyős kijelzőhöz is:

Az eddig leírtak erre a változatra is érvényesek. A különbség, hogy az érintőszenzor driverjét is telepíteni kell (ft6x36.py). A firmware nem kompatibilis a régivel, ezért a firmware_96.zip-ben lévő állományokat kell az ESP32-be föltelepíteni. A vezérőpanel és a kijelző összekötésének módja a connector.txt-ben található. Mivel nincsenek nyomógombok, így nem szükséges külön panel a kijelzőhöz, elég csak a csatlakozók lábait megfelelően összekötni, vagy készíteni egy köztes lapot a lentebb látható kép alapján. Gyors beállításhoz ebben a változatban is használhatunk potenciómétert (potenciómétereket). Ha van eleváció-vezérlés, akkor az azimut kör közepét megérintve az azimut és eleváció helyén a potencióméter állása jelenik meg. Az azimut potencióméter pillanatnyi állását az azimut körön kívül lévő pont is mutatja. Az azimut mezőt megérintve az antenna az azimut potencióméter által megadott pozícióba fordul. Ha az elevációs mezőt érintjük meg, akkor az eleváció fordul a potencióméter által megadott irányba. Ha a forgatót csak vízszintes forgatásra használjuk, akkor a potencióméter pillanatnyi helyzete az elevációs mezőben állandóan látható. Ilyenkor ezt a mezőt kell megérinteni ahhoz, hogy az antenna beforduljon a kívánt irányba. Ha nem használunk potenciómétert, akkor az azimut körön kívüli pont a külső parancs által megadott pozíciót mutatja (ahová az antennának fordulnia kell).
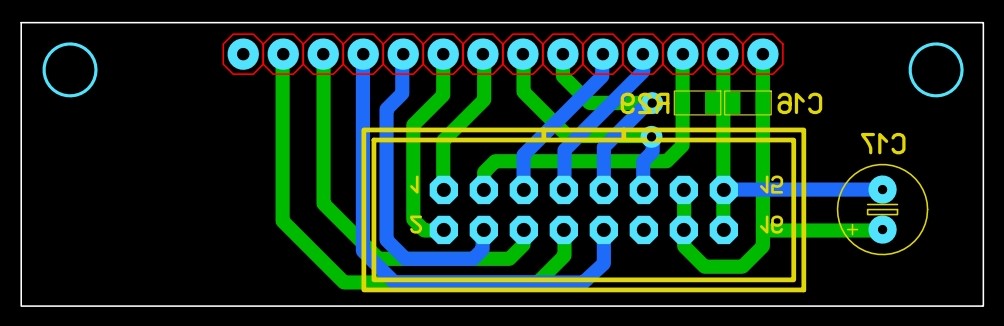
Aki jobban szereti a nyomogombokat (esetleg érintő szenzor nélküli kijelzője van), vagy a rádiófrekvencia megzavarja az érintőkijelzőt (sajnos a kapacitív érzékelők hajlamosak erre), az hasznalhatja nyomogombokkal is. Ehhez a tipushoz használhatjuk ezt a NYÁK-ot:
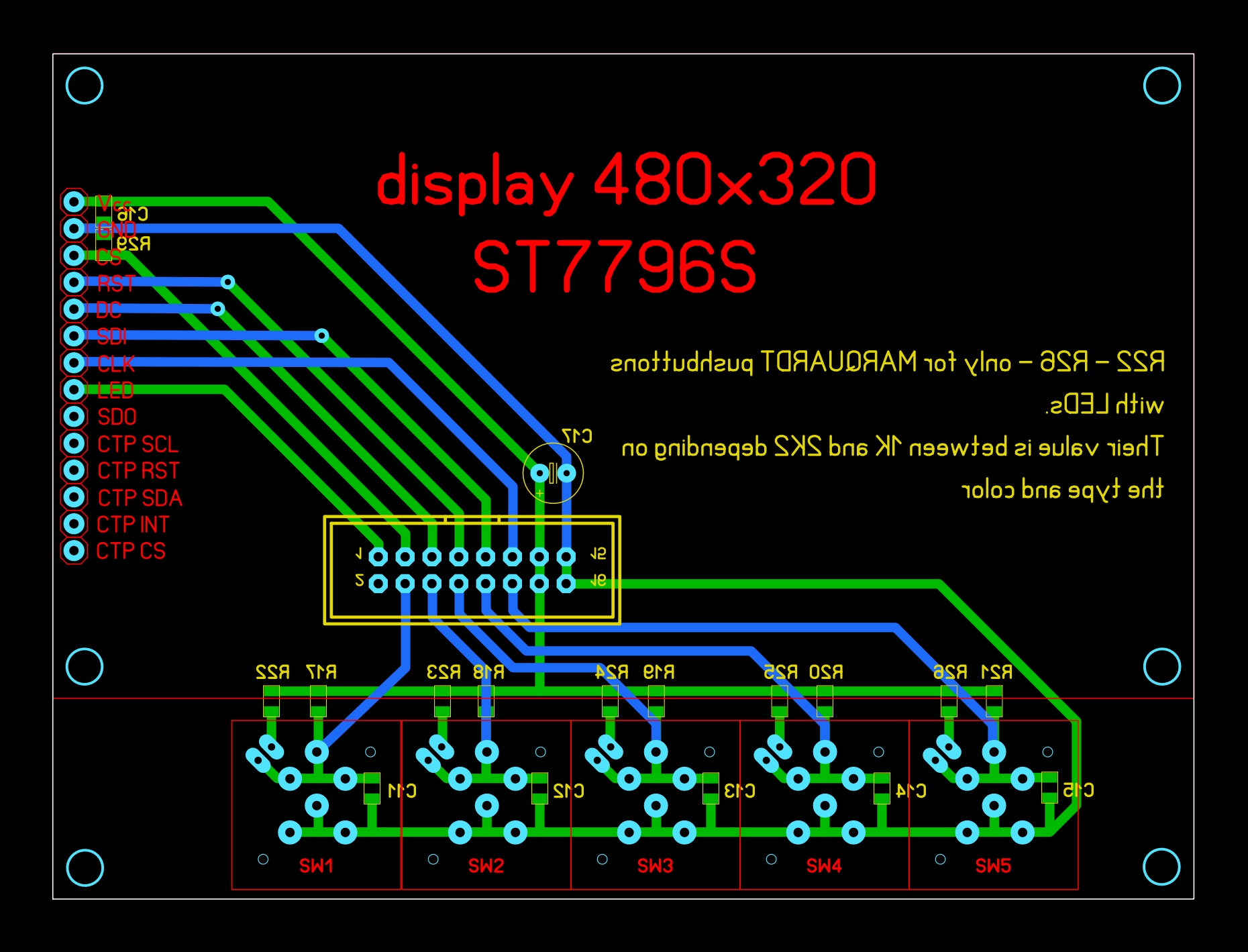
Itt MARQUARDT tipusú nyomógombok vannak. Ezeknek sokkal kellemesebb a működésük, finoman és megbízhatóan reagálnak. Használhatunk LED-es vagy LED nélküli gombokat is.
gerber file a NYÁK elkészítéséhez: display40
Univerzális firmware, ez használható a nyomógombos és érintőszenzoros kijelzőhöz is.
Az alkatrészek beszerzésének lehetőségei:
ESP32 modul
Motorvezérlő
UART-COM átalakitó
1.9 colos kijelző
2.4 colos kijelző
2.8 colos kijelző
4.0 colos kijelző
stabilizátor
kapcsolók
csipogó
csatlakozó lista
csatlakozó kábel
csatlakozó panel
főkapcsoló 15x21
tápegység vagy itt
csatlakozó zöld vagy itt
vagy
PV05-5.08-H-P EUROCLAMP
PV02-5.08-H-P EUROCLAMP
PV02-5.08-V-P EUROCLAMP
SH05-5.08 EUROCLAMP
SH02-5.08 EUROCLAMP
MARQUARDT sapka
A rajzok, valamint a processzorban található program a szerző szellemi tulajdona. Kereskedelmi hasznositása csak a szerző írásos belegyezésével megengedett!
A forgató vezérléséhez készült egy műholdkövető program is, amely ezen a címen található. Ezzel a programmal több műhold automatikus követésére van lehetőség.