
A
vezérlő első
sorban BIGRAS forgatókhoz készült, de használható egyéb impulzus
visszajelzést használó forgatókhoz is. A függőleges forgatást
kikapcsolva RAK vagy BIGRAK forgatók teljes körű használata is
lehetséges. A firmware kismértékű
átalakitása esetén analóg visszajelzéssel is hasznalható (YAESU). Ez a
vezérlő 4" kijelzőhöz használható. Fontos, hogy a kijelzőben ST7796 tipusú
csip legyen, és az érintő szenzor kapacitiv legyen FT6336 csippel..
Elérhető funkciók:
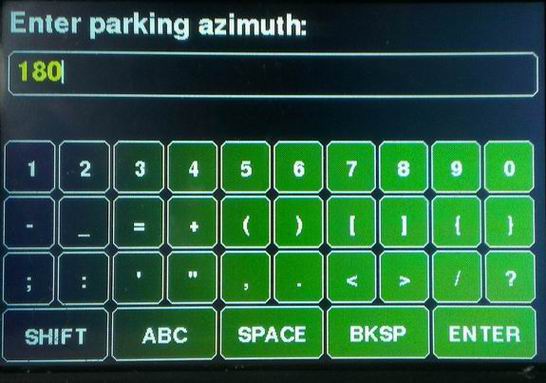
A vezérlő négy módon irányitható. A lapon lévő két USB csatlakozó közül az egyik natív USB 1.1 tipusú, ennek sebessége 12 Mbps. A másik USB port egy USB-UART átalakitó. Bd. Ezen kívül használható standard RS232 COM port egy TTL-RS232 átalakitón keresztül. Ezekek a sebessége 300 és 230400 Bd között állítható. Megfelelő program esetén lehetőség van az antennát WiFi-n keresztül is vezérelni. Az említett lehetőségek akár egyszerre is használhatóak. A beállítások szintén elérhetőek vagy egyenesen a vezérlőből, soros porton keresztül, vagy WiFi-n, amikoris a megfelelő weblapot megnyitva tudjuk megváltoztatni a beállításokat. A vezérlő főbb parancsai a Yaesu GS232-vel kompatibilisek, így szükség esetén azt kell kiválasztani. A teljes parancskészlet a soros porton keresztül a H paranccsal érhető el. A Yaesu parancsokon kívül értelmezni tudja a FOXDELTA tipusú parancsokat, valamint a standard NMEA tipusú GPGGA üzeneteket is. Ha előtte beállitottuk a saját koordinátáinkat, akkor az üzenetekben lévő adatok alapján kiszámitja az adott ponthoz tartozó azimutot és elevációt, majd az antennát az adott pont irányába forditja. Ez a funkció elsősorban magaslégköri ballonok követésénél használható (például a SondeMonitor nevű programnak van ilyen kimenete, így ez a program egyenesen tudja forgatni az antennát). A vezérlő továbbá tudja emulálni a PSTRotator és rotctld programokat is. Így ha valamelyik általunk használt programban a forgató vezérlése csak PSTRotator vagy rotctl protokollal lehetséges (pl. SatDump, Horus), elég beállítanunk mindkét helyen a megfelelő portszámot, és a használt programban a vezérlő IP címét, amit a Menu ablak bal felső sarkában látunk. Természetesen szükséges, hogy föl legyünk csatlakozva a WiFi hálózatra. A menübe a STOP gomb hosszantartó megnyomásával jutunk (addig tartjuk, míg elő nem jön a menüablak). Itt a le-föl gombok nyomogatásásával (vagy lenyomva tartásával) tudunk lépegetni. Ez után a kiválasztott sorban az értéket a jobboldalsó gombokkal tudjuk kiválasztani. Amelyik paraméternél a jobb szélső gombon a SET felirat jelenik meg, annál az értéket a SET gomb megnyomása után megjelenő billentyűzeten keresztül tudjuk bevinni. A Background paraméter segítségével több színkombináció közül választhatunk. Mivel a vezérlő több tipusú forgató mechanikához is alkalmas, ezért a kijelzőn megjelenő adatok is különbözőek attól függően, hogy van eleváció vagy nincs, és hogy a messziről jobban látható nagy számokat vagy a grafikát és a kisebb számokat részesítjük előnyben.
Leírás:
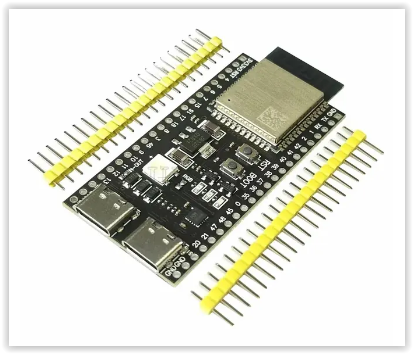
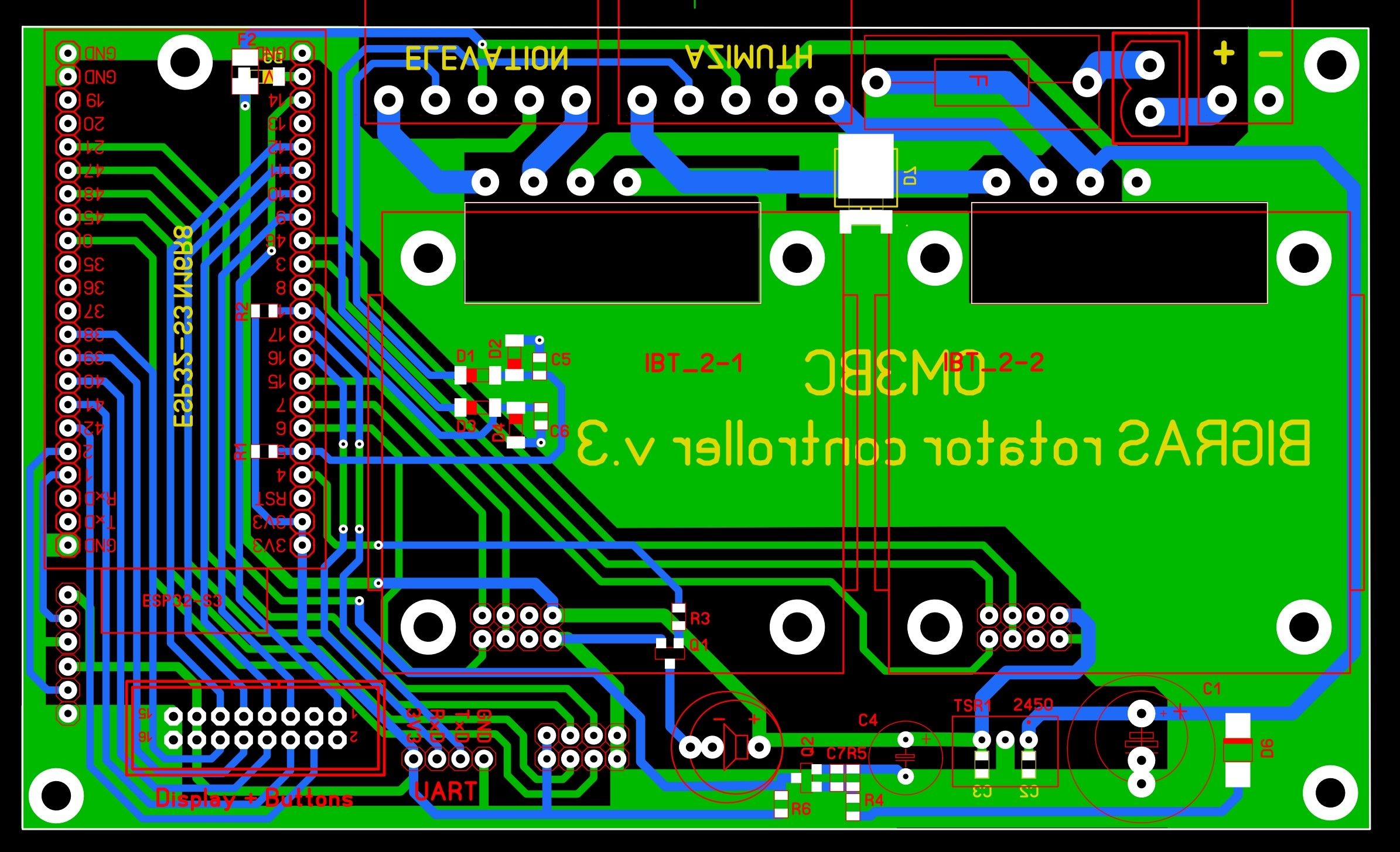
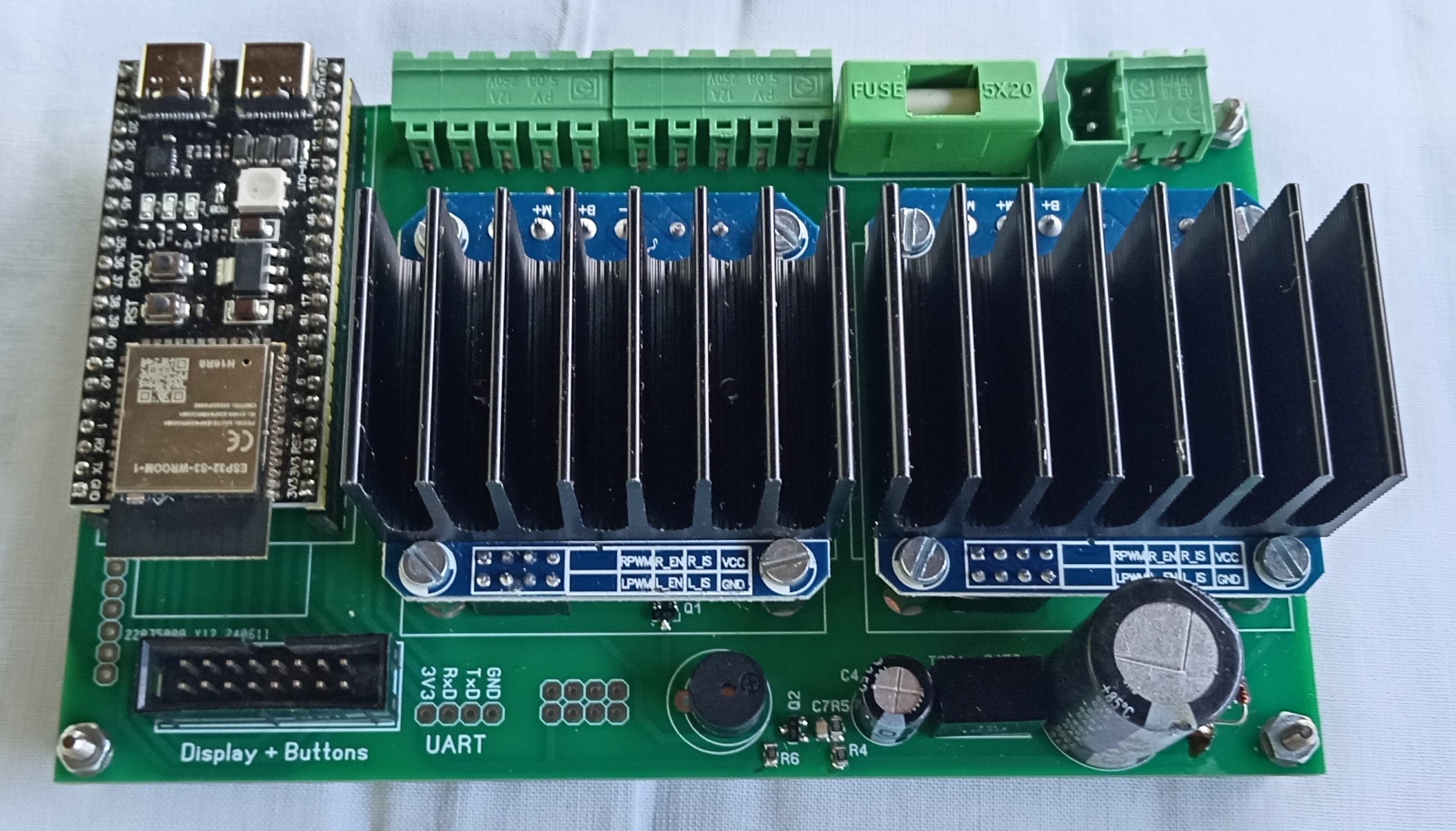
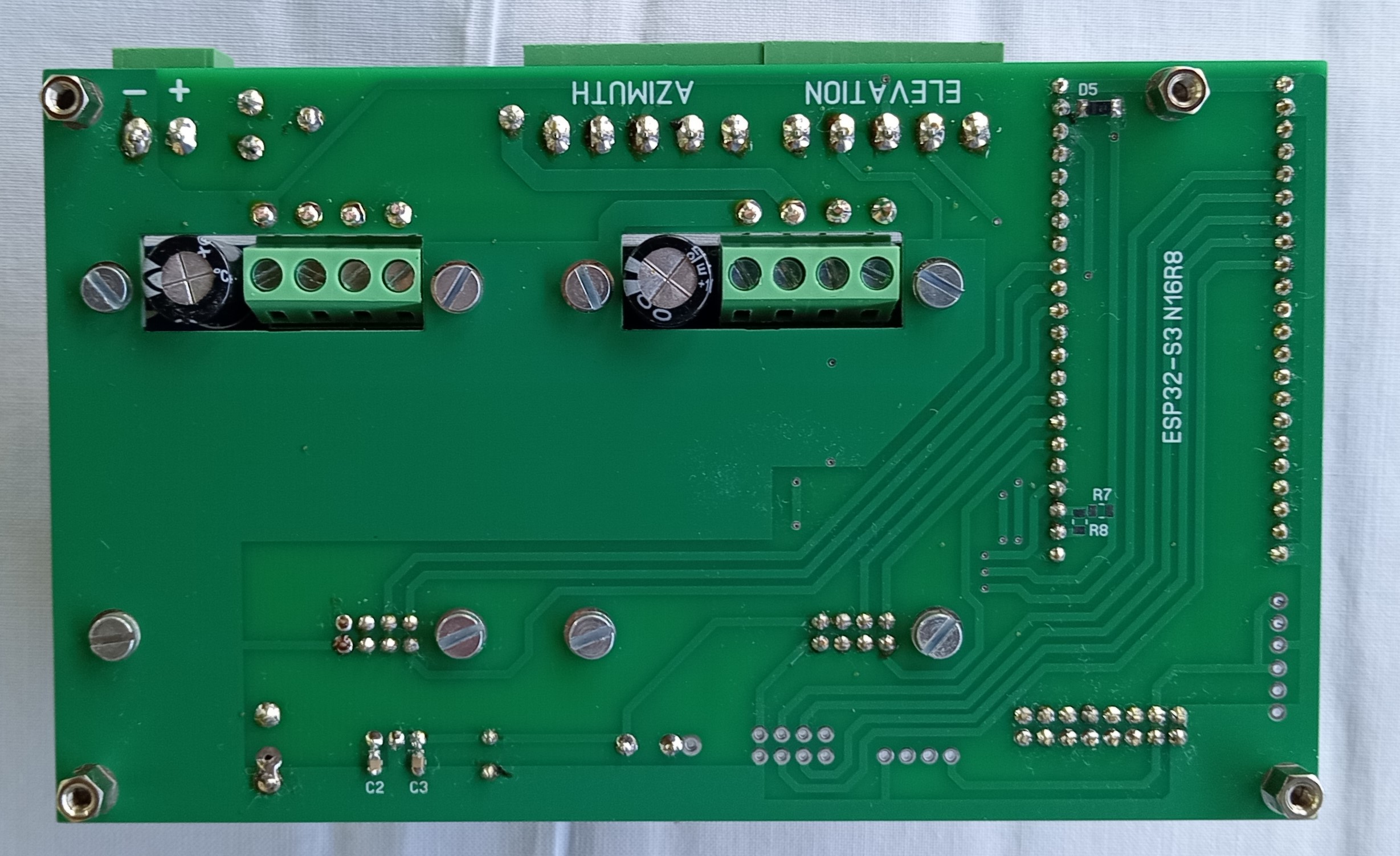
A vezérlő áramkör központi eleme egy ESP32-S3 N16R8 tipusú modul. A képen látható modult szerezzük be, mert van forgalomban olyan változat is, amelyiknél a nyomógombok közvetlenül az USB csatlakozók fölött vannak. Az a modul azonban 2,54 mm-rel keskenyebb, így az a tüskesor elhelyezkedése miatt nem fog illeszkedni a NYÁK-ba.
 vagy
vagy 
Egyes gyártó egy betöltött demo programmal árulja a modult, amely bekapcsolás után villogtatja a modulon lévő LED-et. Ha ilyent sikerült beszerezni, akkor bontani kell a modulon lévő RGB jelű rövidzárat. Az RGB led mellett található egy másik rövidzár IN-OUT felirattal. Ezt rövidre kell zárni! Az elkészítés egyszerűsítése érdekében magának a motornak a vezérlésére is egy kész, IBT_2 tipusjelzésű modul lett alkalmazva. Mivel a COM csatlakozások már kifutóban vannak, ezért nem lett volna ésszerű ezt ráintegrálni a nyomtatott lapra, de szükség esetén ez a modul is külön csatlakoztatható. A kijelzőn 5 nyomógomb található. Ezek funkciója az éppen aktuális helyzettől függ. Hogy melyik nyomógomb éppen mire szolgál az a nyomógombon van feltüntetve. Ha a vizszintes és függőleges forgatás is aktív, akkor a balról jobbra haladva: antenna le, antenna föl, stop vagy menü, antenna balra (az óra járásával ellentétes irányban), antenna jobbra (óra járásával megegyező irányba).


Ha csak a vízszintes forgatás aktív, akkor a bal szélső gomb a balra fordulás, jobb szélső gomb a jobbra fordulás, a középső gomb a stop vagy menü.


A STOP gombnak több funkciója van. Rövid ideig megnyomva leállítja a motorokat. Ha egy kicsit tovább tartjuk nyomva, akkor megjelenik egy BLOCK felirat. Ilyenkor a kintről jövő utasítások blokkolva vannak, a forgató csak a nyomógombokra reagál. Erre a háromszori pippenés figyelmeztet. Ha STOP gombot hosszú ideig nyomva tartjuk, akkor bejutunk a menübe.
Ha a forgató beszorul, vagy egyéb okok miatt nem tud forogni, akkor 5 masodperc után egy ERROR felirat jelenik meg, és a forgató leáll, hogy a motorokat megvédje a túlterheléstől. Ha ebben az esetben külső parancs jön, akkor 3-szor csipog, hogy jelezze, nem tudja a parancsot végrehajtani. Ebből az állapotból a STOP gomb megnyomásával tudunk kilépni.

A továbbiakban leírt funkcióknak használata csak a kényelmet szolgálja, nincs hatással a vezérlő fő funkcióira. Beszerelésük nem feltétlenül szükséges:
A P1 és P2 potencióméterekkel egyszerűbben fordítható az antenna a kívánt pozícióba úgy, hogy a potencióméterrel beállítjuk a kívánt irányt majd a megfelelő gombot megnyomva (valójában a kijelzőt a megfelelő helyen megérintve) az antenna beáll a potencióméter által megadott irányba. Használhatunk egy közös potenciómétert a vízszintes és függőleges irányra, vagy külön potenciómétert a vízszintes és külön a függőleges irányra.

Ha használunk potenciómétert, akkor az azimut körön kívül lévő piros pont a potencióméter irányát mutatja. Ha olyan kijelző van beállítva, amelyiken nem jelenik meg a potencióméter helyzete numerikusan, akkor az azimut kör közepét megérintve előjön a potencióméterek pozíciója. Az antennát úgy tudjuk befordítani a potencióméter által megadott irányba, hogy a kijelzőn megérintjük azt a területet, ahová az azimut, vagy eleváció értéke van kiírva.
A jobb felső sarokban lévő P gombot megérintve, az antenna befordul a Parking azimuth és Parking elevation paraméterrel beállított irányba.
Az antenna forgatásához használható főbb parancsok:
Waaa eee - fordítsd az antennát vízszintesen az aaa, függőlegesen az eee irányba
A - azimuth állj
AZ=aaa - forditsd az antennát vizszintesen aaa irányba
AZ=aaa EL=eee - forditsd az antennát vizszintesen az aaa, függőlegesen az eee irányba
E - eleváció állj
EL=eee - fordítsd az antennát függőlegesen az eee irányba
S - minden állj
Maaa - forditsd az antennát vízszintesen aaa irányba
Keee - fordítsd az antennát függőlegesen az eee irányba
ML - fordítsd az antennát az óra járásával ellentétes irányban
MR - fordítsd az antennát az óra járásával megegyező irányban
MU - fordítsd az antennát felfelé
MD - fordítsd az antennát lefelé
L - fordítsd az antennát az óra járásával ellentétes irányban
R - fordítsd az antennát az óra járásával megegyező irányban
U - fordítsd az antennát felfelé
D - fordítsd az antennát lefelé
C - az antenna pillanatnyi helyzete vízszintes irányban
C2 - az antenna pillanatnyi helyzete vízszintes és függőleges irányban
B - az antenna pillanatnyi helyzete függőleges irányban
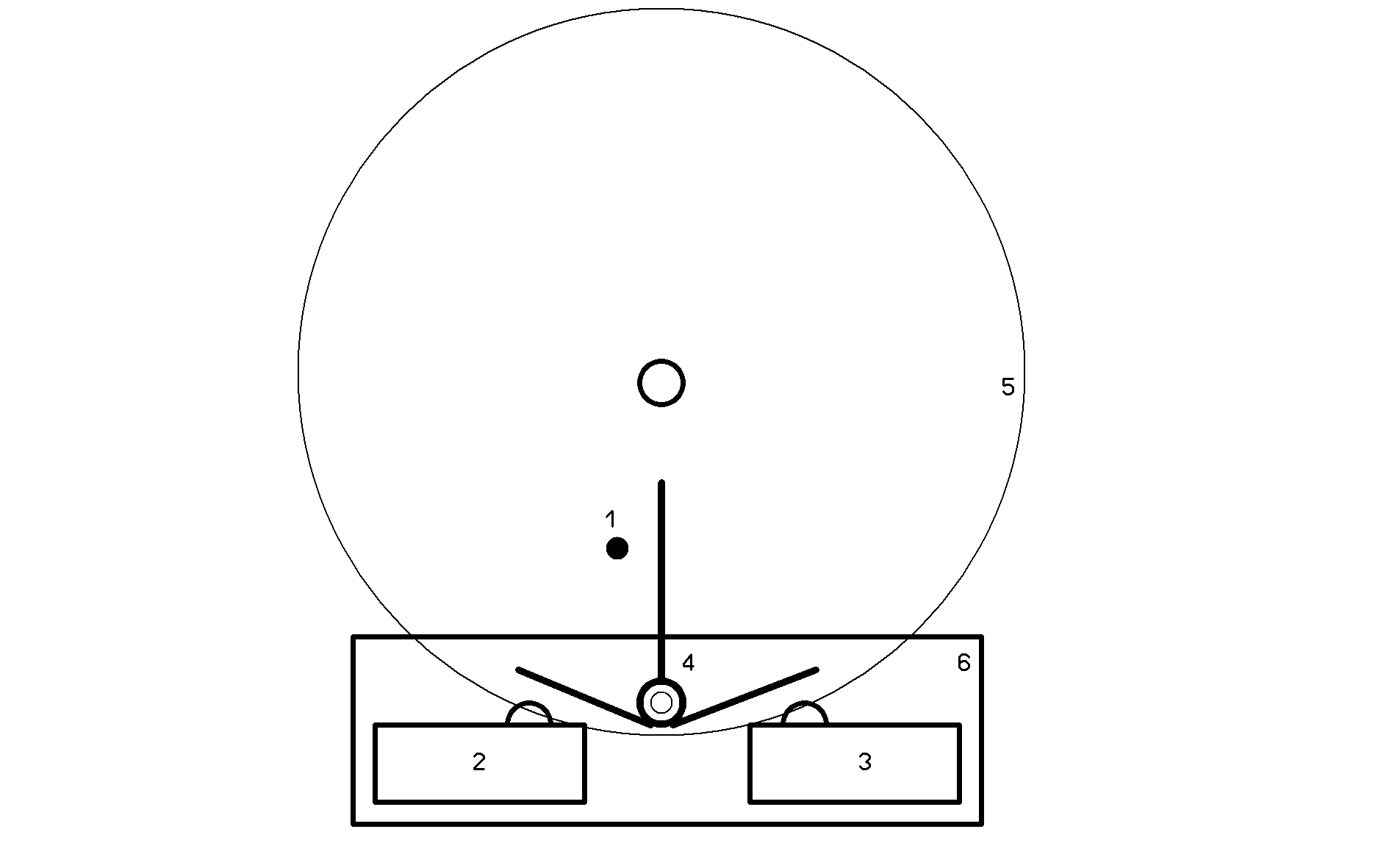
Ahhoz hogy az antenna kalibrálása megfelelően működjön, a forgató-mechanikába be kell épiteni egy végkapcsolót, ami a forgást vizszintes irányban a kezdő pozicióban leállitja. Ilyen végállás-kapcsoló a függőleges irányban eredetileg is be van épitve, de vizszintes irányban - számomra érthetetlen okokból - nincs, igy azt nekünk kell pótolni. Gondolom senki sem szeretné ha a koaxkábele azért szakadna el, mert föltekeredett az antennára. Ezt nem túl nehez megoldani, de egy kis kreativitás kell hozzá annak alapján hogy kinek milyen eszközök és végkapcsolók állnak a rendelkezésére. Arra minden esetben vigyázni kell, hogy a kapcsoló csak az egyik irányban legyen aktiv. Egy lehetséges megoldást ez a kép szemléltet. Ezen:
{kind=link}
1 - függőleges pálca a fogaskeréken
2,3 - végkapcsolók
4 - lemezből kialakitott kar a végkapcsolók kapcsolására
5 - fogaskerék
6 - segéd panel amelyre a kar tengelye és a végkapcsolók vannak szerelve
Ennek a megoldásnak az az előnye, hogy mindkét irányban van végkapcsoló, és a lemezkar megfelelő beállitásával elérhető a szükséges túlfordulás. Az antennát úgy rögzítsük a forgatón, hogy mindkét végén kölülbelül egyforma legyen a túlfordulás. Ilyenkor az óra járásával ellentétes irányban lévő túlfordulás értékét írjuk be amenüben az "azimuth offset" értékének.
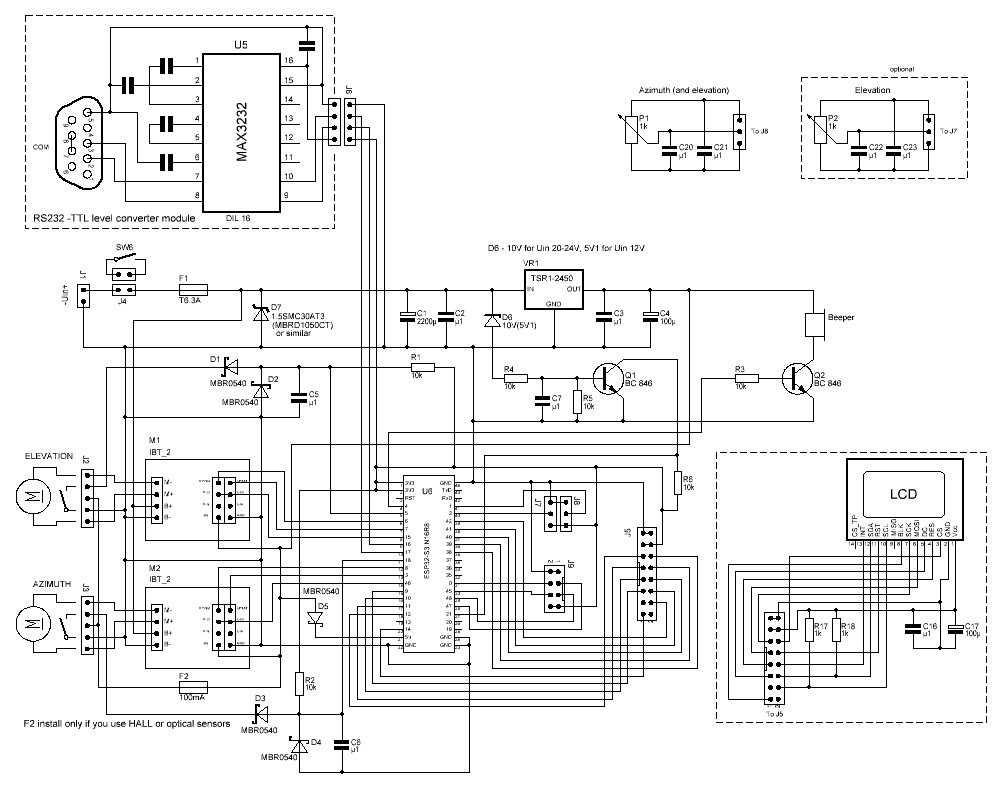
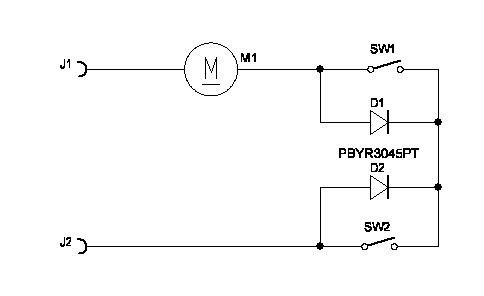
A bekötési rajz:
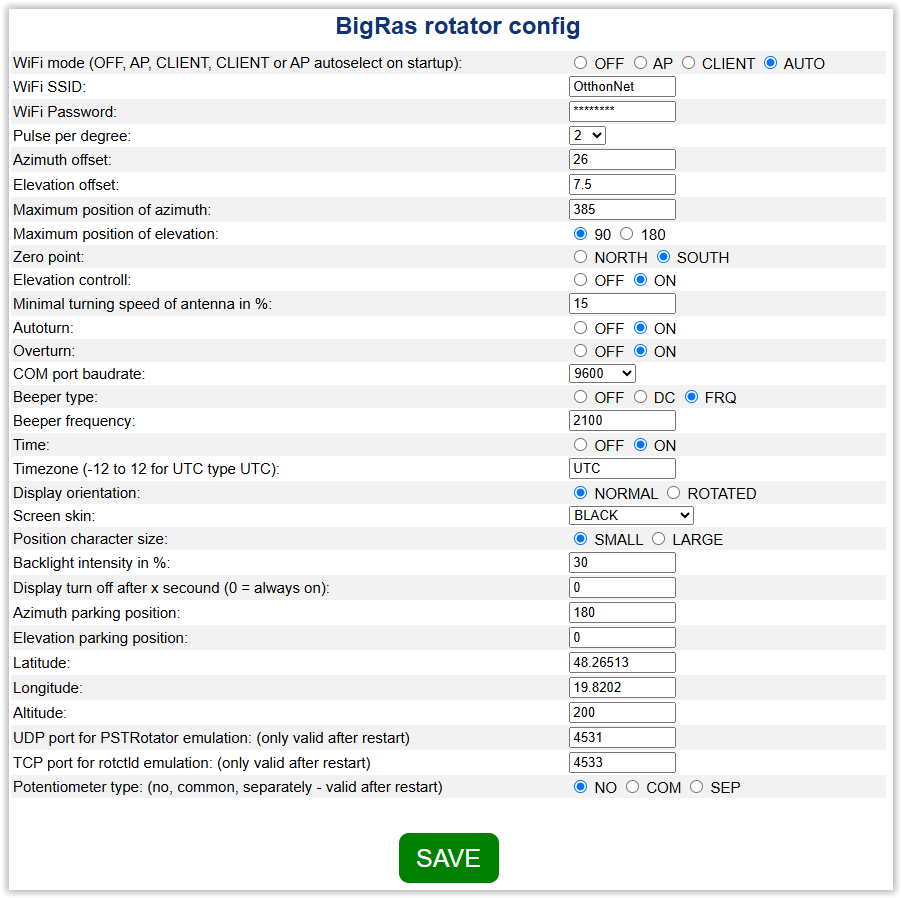
Beállítások:
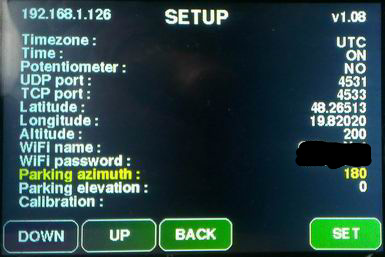
A legfontosabb paramétereket a menüben érhetjük el. Ide a középső gomb (STOP) hosszú idejű megnyomásával jutunk. Ilyenkor egy többsoros menü jön elő amiben görgetéssel (UP, DOWN) juthatunk el a megfelelő menüpontra. Ezek a következők:
AZ turn to: itt beállíthatjuk, hogy vízszintes irányban hova forduljon az antenna, ha kilépünk a menüből
EL turn to: itt beállíthatjuk, hogy függőleges irányban hova forduljon az antenna, ha kilépünk a menüből
Pulse/degree: itt állíthatjuk be, hogy a forgató hány impulzust ad 1 fok elfordulasára
Azim offset: hány fokra van az antenna nullpontja a baloldali végállástól
Elev. offset: hány fokra van a vízszintes állás a végkapcsolótól
Max. azimuth: az antenna poziciója felső végállásban
Max. elevat.: a megengedett maximális eleváció az antennarendszer függfényében (90 vagy 180 fok)
Beeper type: ha az érték OFF akkor a csipogó ki van kapcsolva, nem ad hangjelzést ha a soros porton parancs érkezik, DC - aktív csipogó esetén, vagy szám, ami a csipogó frekvenciáját jelenti. Értéke 200 és 5000 között lehet.
Elevation: ON vagy OFF, ha a forgató nem alkalmas a fuggőleges forgatásra, ezt a paramétert állitsuk OFF-ba
Overturn: ON vagy OFF, ha az antenna lehetővé teszi a túlfordulást, akkor ezt a paramétert ON-ba kapcsolva, a forgató a vizszintes irányban az offset és a max. azimuth-al beállitott érték között folyamatosan használható. OFF állapotban csak 0 és 360 között.
Autoturn: ON állapotban ha a CW, CCW, UP vagy DOWN gombot 5 masodpercig nyomva tartjuk, akkor a gomb elegedése után az antenna forog tovabb, amíg vagy ujra megnyomjuk valamelyik gombot, vagy a forgató elér a végállásba
Zero point: ez a paraméter határozza meg, hogy hol van a forgató mechanikai nullpontja, ez lehet déli vagy északi irányban
WiFi: induláskor hogyan viselkedjen a WiFi. Kikapcsolhatjuk, vagy beállithatjuk hogy induláskor próbáljon meg fölkapcsolódani a WiFi hálózatra. Ha ez nem sikerül, akkor kapcsoljon AP-módba.
Backlight: a háttérvilágitás intenzitása
COM baudrate: a soros port sebessége
Degree size: a pozíció betűmérete
Screensaver: kepernyőkímélő, 0 esetén ki van kapcsolva (a kijelző folyamatosan világít), szám esetén ennyi másodperc után kapcsol ki a kijelző
Orientation: a kijelző orientációja. Ezzel tudjuk beállítani, hogy az előlapon a főkapcsoló a jobb, vagy a bal oldalon legyen.
Minimal turn: A forgató minimális forgási sebessége, aminél az antenna még megbízhatóan forog. Induláskor erről a sebességről gyorsít föl a maximális sebességre, leállás előtt erre a sebességre lassít le, hogy a forgatót ne érjék erős behatások. Ennek köszönhető, hogy műhold követése esetén is folyamatosabb a mozgás.
Background: a kijelzőn használt szinkombinációk
Timezone: állitsd be a saját időzónádat, ha nem UTC-ben akarod látni az időt. (Időeltolódás az UTC és a téli időszámitás között. A nyári időszámítás beállítása automatikusan történik)
Time: ON vagy OFF, attól függően, hogy akarjuk-e látni az órát vagy nem.
Potentiometer: állitsd be, hogy van e potencióméter, és ha igen, akkor közös a két irányra vagy külön
UDP port: port beállítása a PSTRotator részére
TCP port: port beállítása a rotctl részére
Latitude: állitsd be a saját szélességi koordinátádat
Longitude: állitsd be a saját hosszúsági koordinátádat
Altitude: állitsd be a saját tengerszent fölötti magasságod
WiFi name: állitsd be a saját WiFi AP nevét
WiFi password: állitsd be a saját WiFi jelszavát
Parking azimuth: állitsd be a parkolási pozíciót (ha akarod használni)
Parking elevation: állitsd be a parkolási pozíciót (ha akarod használni)
Calibrate a forgató pozíciójának kalibrálása. Vízszintes irányban csak a végkapcsolók utólagos beépítésével használható, függőleges irányban a végkapcsoló már gyárilag be van építve
Ha a WiFi SSID és jelszó helyesen van beállitva, akkor ujraindítás után a menüablak bal felső sarkában látjuk a kapott IP számot. Ezen az IP számon tudjuk egy böngészőn keresztül elérni a beállitásokat. A jobb felső sarokban látható a firmware verziószáma. Sikeres csatlakozás esetén ha a menüben az idő megjelenítése engedélyezve van akkor a kijelző felső részén megjelenik a pontos idő UTC-ben, vagy helyi időben attól fuggően, hogy a menüben milyen időzóna van beállitva.
Ha használni akarjuk a WiFi-t, mindenképpen ellenőrizzük le a menüben, hogy a WiFi OFF állapotban van-e. Ha igen, akkor kapcsoljuk be. Válasszuk, ki, hogy csak AP, vagy csak CLIENT uzemmódot akarunk, vagy kapcsoljuk AP+Client módba. Ha a vezérlő nem tud csatlakozni a WiFi hálózatra, és ha ez a funkció nincs letiltva, akkor egy AP-t hoz létre, amit vagy a ROTOR-AP SSID-vel vagy a 192.168.4.1 IP címen érhetünk el. Ebben az esetben a jelszó 1234567890. Ha beállítottuk a WiFi-t akkor a vezérlőt újra kell indítani, mert csak bekapcsoláskor ellenőrzi a beállítást.
A paraméterek beállításának harmadik módja, hogy a soros porton elküldjük a megfelelő parancsokat. A parancsok listáját a H vagy h paranccsal tudjuk lekérni.
Elkészítés:
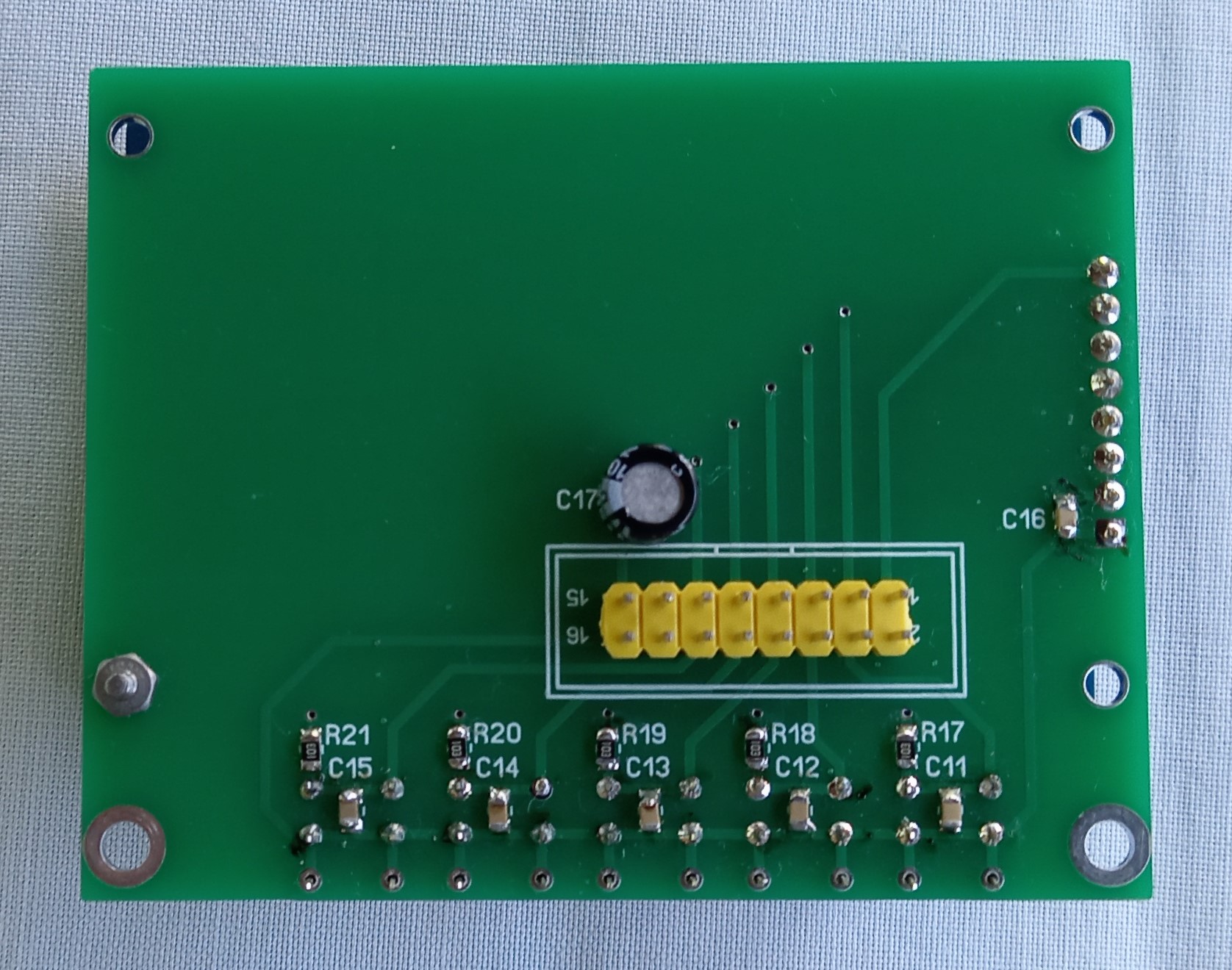
Mint látható a NYÁK meglehetősen egyszerű. Csak néhány alkatrészt és a csatlakozókat tartalmazza. Az alkatrészek beszerzésével sem lehet nagyobb gond, mert minden ellenállás értéke 10 k, a keramikus kondenzátoroké 100 nF. Mindegyik mérete 0805. A zener és védő diódát kivéve az összes dióda shottky.
A kijelzőt beköthetjük egyenesen is, úgy, hogy a szalagkábel egyik végére a 16 lábú csatlakozót tesszük, a másik végére pedig egysoros csatlakozót, amit a rajznak megfelelően kötünk be. Esetleg használhatunk egy ilyen köztes panelt:
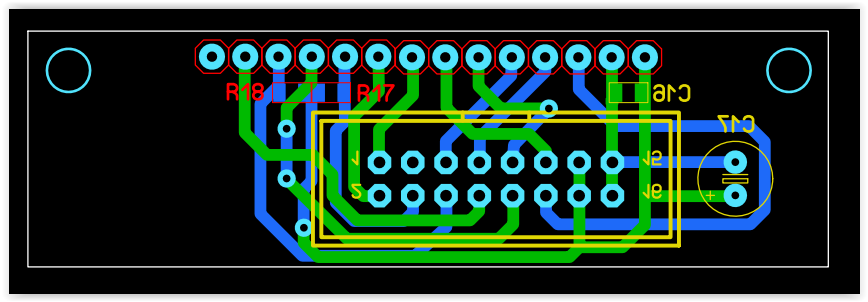
gerber file
{kind=link}
Ügyeljünk arra, hogy a WiFi antenna a modulon kapott helyet, ezért a vezérlőt vagy műanyag dobozba szereljük, vagy a fém doboz ne legyen túlságosan zárt, hogy a WiFi jel kijusson a dobozból. A hűtés szempontjából amúgy sem lehet a doboz túlságosan zárt.
A vezérlőhöz 3D nyomtatóval keszült doboz itt érhető el.
A tápegység nem része a vezérlőnek. Tápegységnek olyan típust válasszunk, amely elviseli az áramfelvétel hirtelen változásait. Én egy LED-ekhez használatos 24V 10A-es tápegységet használok. Ennek a feszültségét a benne található trimmer segítségével 20V alatti értékre allítottam (a beállítható minimumra). A D6 dióda értéke kritikus. Olyan Zener diódát kell alkalmazni, amelynél kikapcsoláskor az ESP32 - 21 portja (megszakítás) még időben kerül LOG0 állapotba ahhoz, hogy a processzornak legyen elég ideje elmenteni az aktuális pozíciót, de a motorok indításakor fellépő feszültségingadozás (az áramfelvétel akár 10A is lehet) még ne aktiválja a megszakítást. Ez nagyban függ a tápegység minőségétől.
Telepítés:
A telepítés nagyon egyszerű. Csak a megfelelő bat filet kell elindítani. A teljes csomag rotator.zip (version 1.22) néven található. Ezt a zip állományt kell egy tetszés szerinti mappába szétcsomagolni. Első alkalommal mindig az install_with_factory_reset.bat állományt kell hasznalni. Legelőször csatlakoztassuk az ESP panelt a számítógephez. Az eszközkezelőben nézzük meg, hogy milyen COM számot kapott a panel. Nyissuk meg az előbb említett bat-ot, és állítsuk be a COM számát, és javítsuk ki a python program elérési útvonalát. Ha a python3 benne van a PATH-ban, akkor elég a sor elejére csak annyit irni python. Elmentjük, majd elindítjuk. Ez után már csak várni kell, hogy a bat lefusson. Ez eltart egy darabig, néha úgy tűnik, mintha semmi sem történne, de történik, ezert legyünk türelmesek. Ha a bat lefutott és megjelenik a standard "Nyomj meg egy gombot..." felirat, akkor a telepítéssel végeztünk is. Ha valamilyen egyéb hibaüzenet jelenik meg, akkor nagy valószinüséggel rossz COM számot adtunk meg, vagy a python elerésével van probléma. A program frissítéséhez a install_upgrade.bat filet kell futtatni a beállítások megtartása érdekében. A COM számot és python elérést itt is be kell állítani a fileban.
alkatrész lista
Az alkatrészek beszerzésének lehetőségei:
ESP32 modul vagy ESP32S3-IPEX
Motorvezérlő
UART-COM átalakitó
4.0 colos kijelző
stabilizátor
csipogó
csatlakozó lista
csatlakozó kábel
csatlakozó panel
főkapcsoló 15x21
tápegység vagy itt
csatlakozó zöld vagy itt
vagy
PV05-5.08-H-P EUROCLAMP
PV02-5.08-H-P EUROCLAMP
PV02-5.08-V-P EUROCLAMP
SH05-5.08 EUROCLAMP
SH02-5.08 EUROCLAMP
A rajzok, valamint a processzorban található program a szerző szellemi tulajdona. Kereskedelmi hasznositása csak a szerző írásos belegyezésével megengedett!
A forgató vezérléséhez készült egy műholdkövető program is, amely ezen a címen található. Ezzel a programmal több műhold automatikus követésére van lehetőség.