
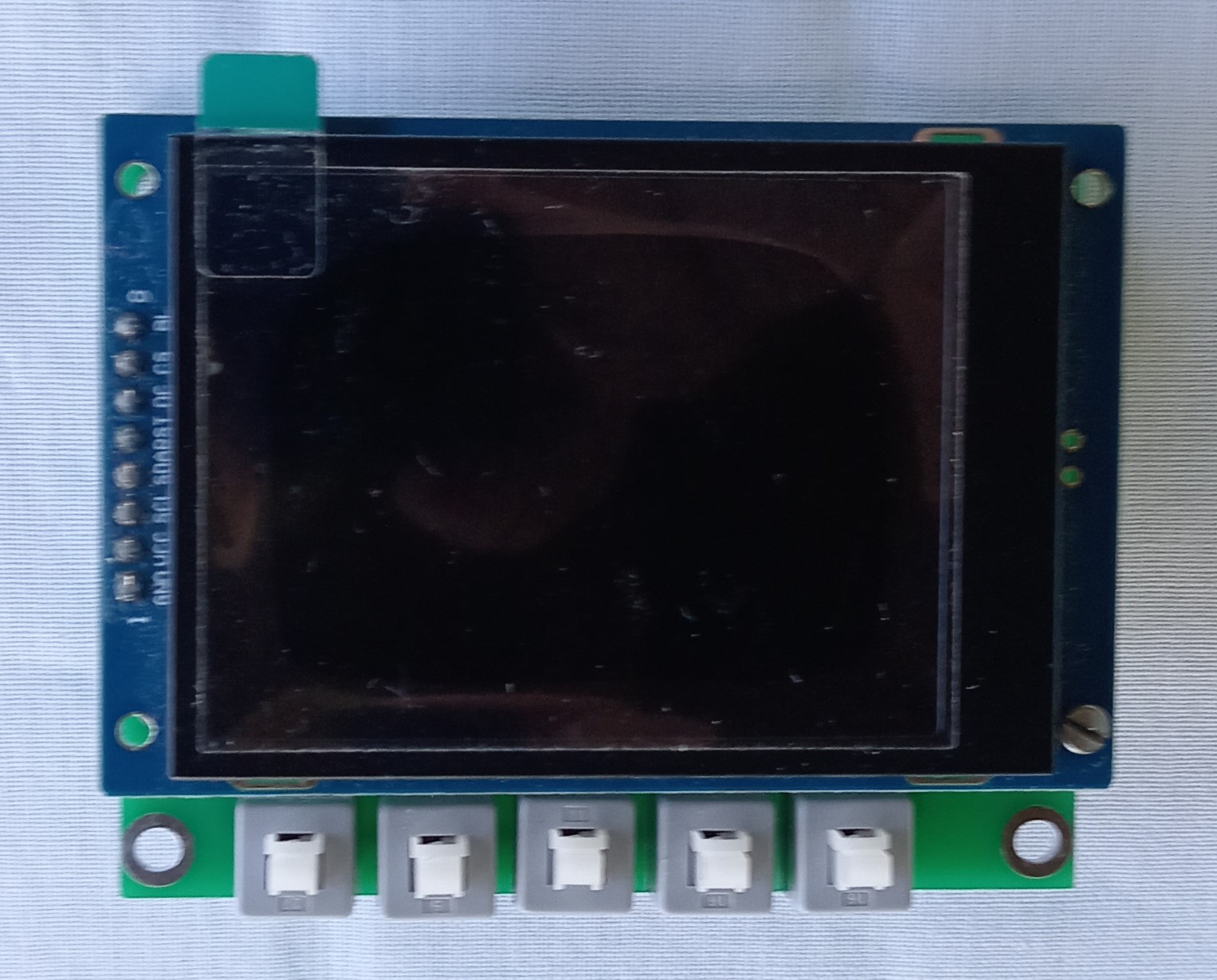
Regulátor je primárne určený pre rotátory BIGRAS, ale je možné ho použiť aj pre iné rotátory, ktoré využívajú pulznú spätnú väzbu. Vypnutím vertikálneho otáčania je možné aj plné využitie rotátorov RAK alebo BIGRAK. V prípade malej úpravy firmvéru je možné ho použiť aj s analógovou spätnou väzbou (YAESU). Pre ovládač je možné použiť tri veľkosti displejov. 1,9" (na obrázku), ako aj 2,4" a 2,8". Dôležité je, že displej musí mať čip typu ST7789.
Dostupné funkcie:
Ovládač je možné ovládať štyrmi spôsobmi. Jeden z dvoch USB portov na doske je natívny typ USB 1.1 s rýchlosťou 12 Mbps. Druhý USB port je USB-UART prevodník, jeho prenosová rýchlosť je pevne stanovená na 115200 Bd. Okrem toho je možné použiť štandardný COM port RS232 cez prevodník TTL-RS232. Jeho rýchlosť je možné nastaviť medzi 300 a 230400 Bd. So správnym programom je možné ovládať aj cez WiFi. Uvedené možnosti možno dokonca použiť naraz. Nastavenia sú tiež dostupné buď priamo z ovládača, cez sériový port, alebo cez WiFi, v takom prípade môžeme nastavenia zmeniť otvorením príslušnej webovej stránky. Hlavné príkazy ovládača sú kompatibilné s Yaesu GS232, preto by sa mal v prípade potreby zvoliť. Úplná sada príkazov je dostupná cez sériový port s príkazom H. Okrem príkazov Yaesu dokáže interpretovať príkazy typu FOXDELTA, ako aj štandardné správy GPGGA typu NMEA. Ak sme si predtým nastavili vlastné súradnice, na základe údajov v správach vypočíta azimut a eleváciu daného bodu a následne natočí anténu v smere daného bodu. Táto funkcia slúži hlavne na sledovanie výškových balónov (takýto výstup má napríklad program SondeMonitor, takže tento program dokáže otáčať anténou rovno). Ovládač môže tiež emulovať programy PSTRotator a rotctld. Ak je teda v niektorom z nami používaných programov ovládanie rotátora možné len protokolom PSTRotator alebo rotctl (napr. SatDump, Horus), stačí na oboch miestach nastaviť príslušné číslo portu a v použitom programe IP adresu ovládača, ktorú vidíme v ľavom hornom rohu okna Menu. Samozrejmosťou je pripojenie k WiFi sieti.
Popis:
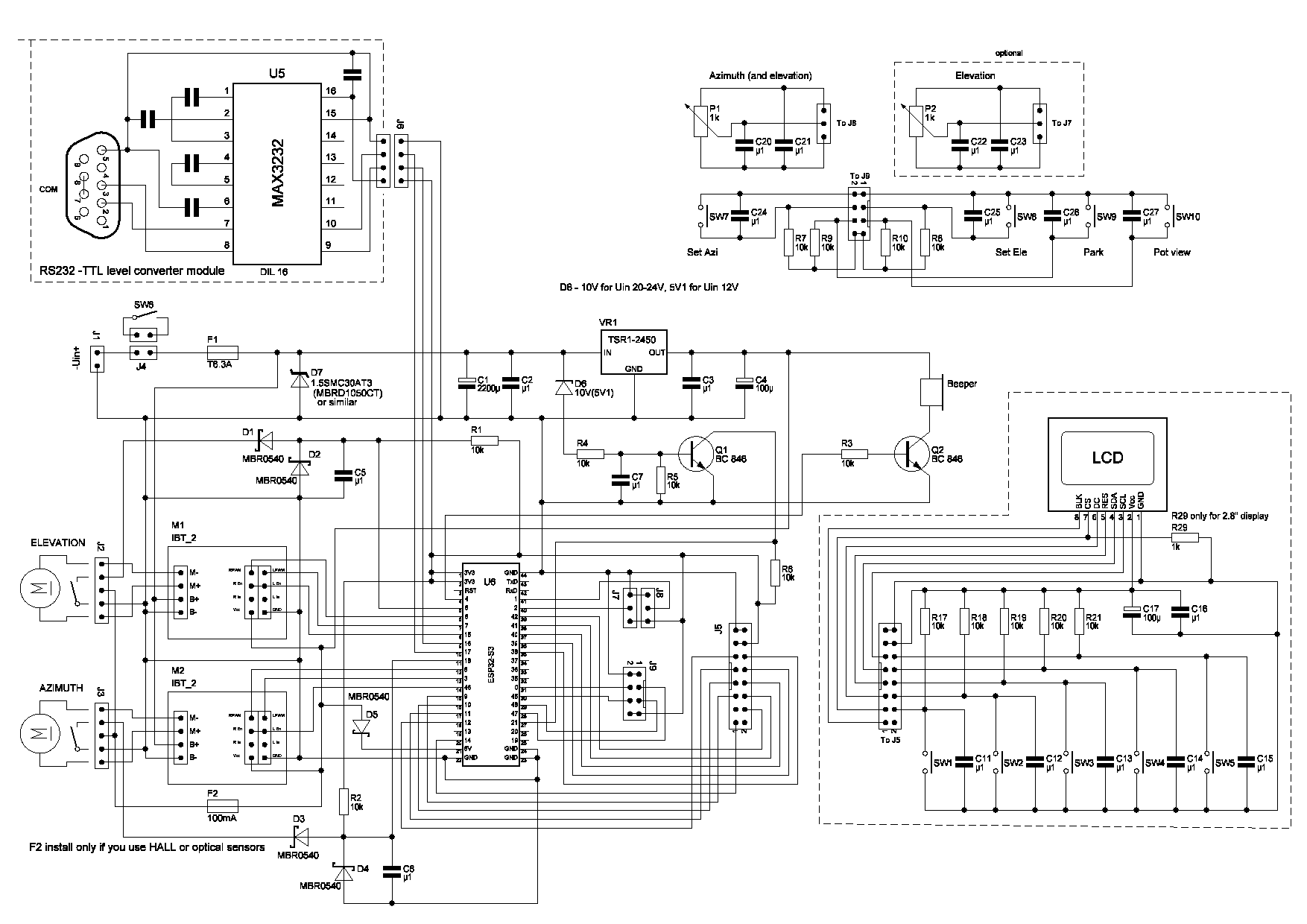
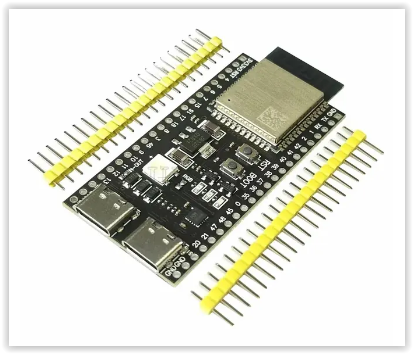
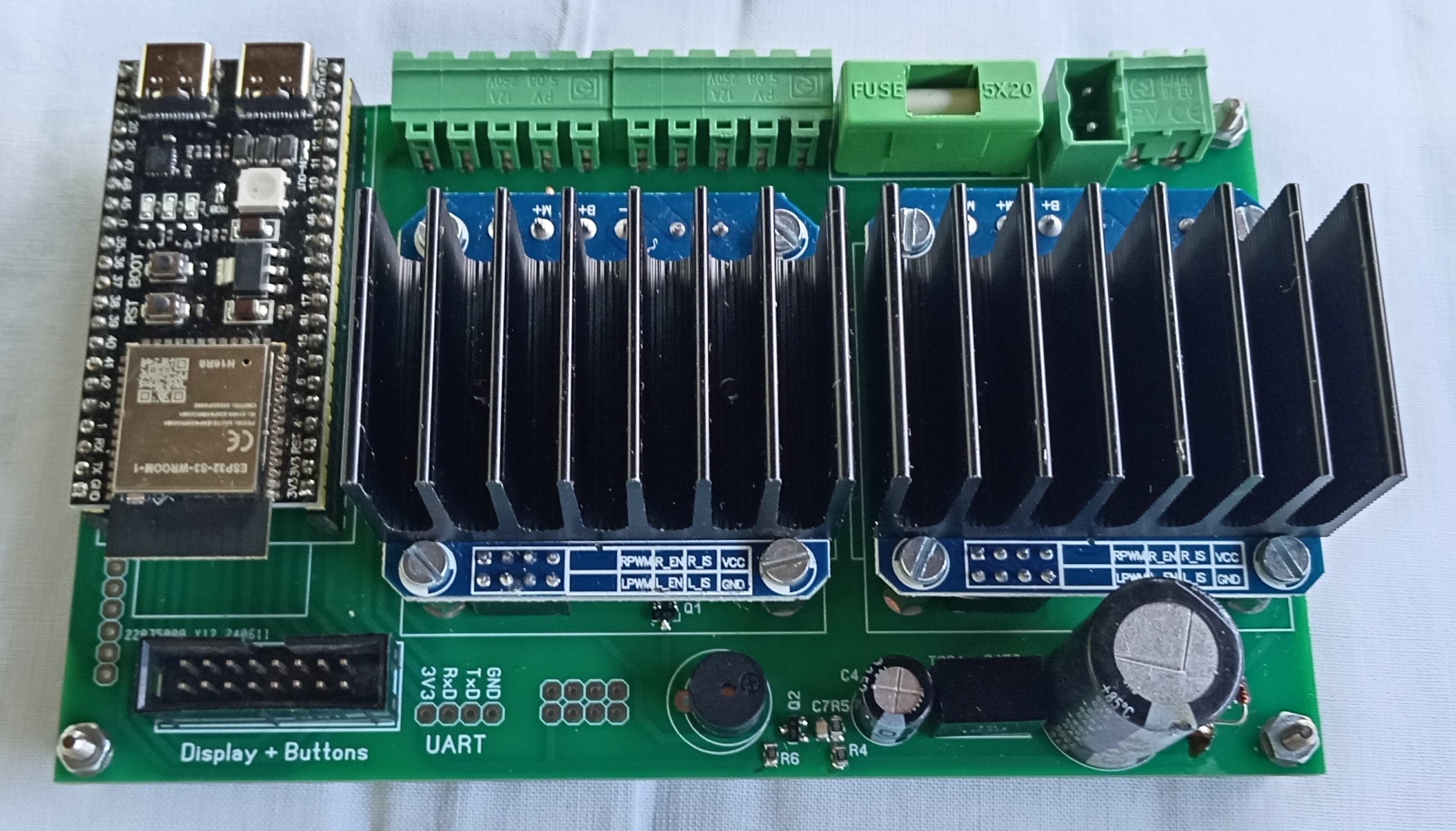
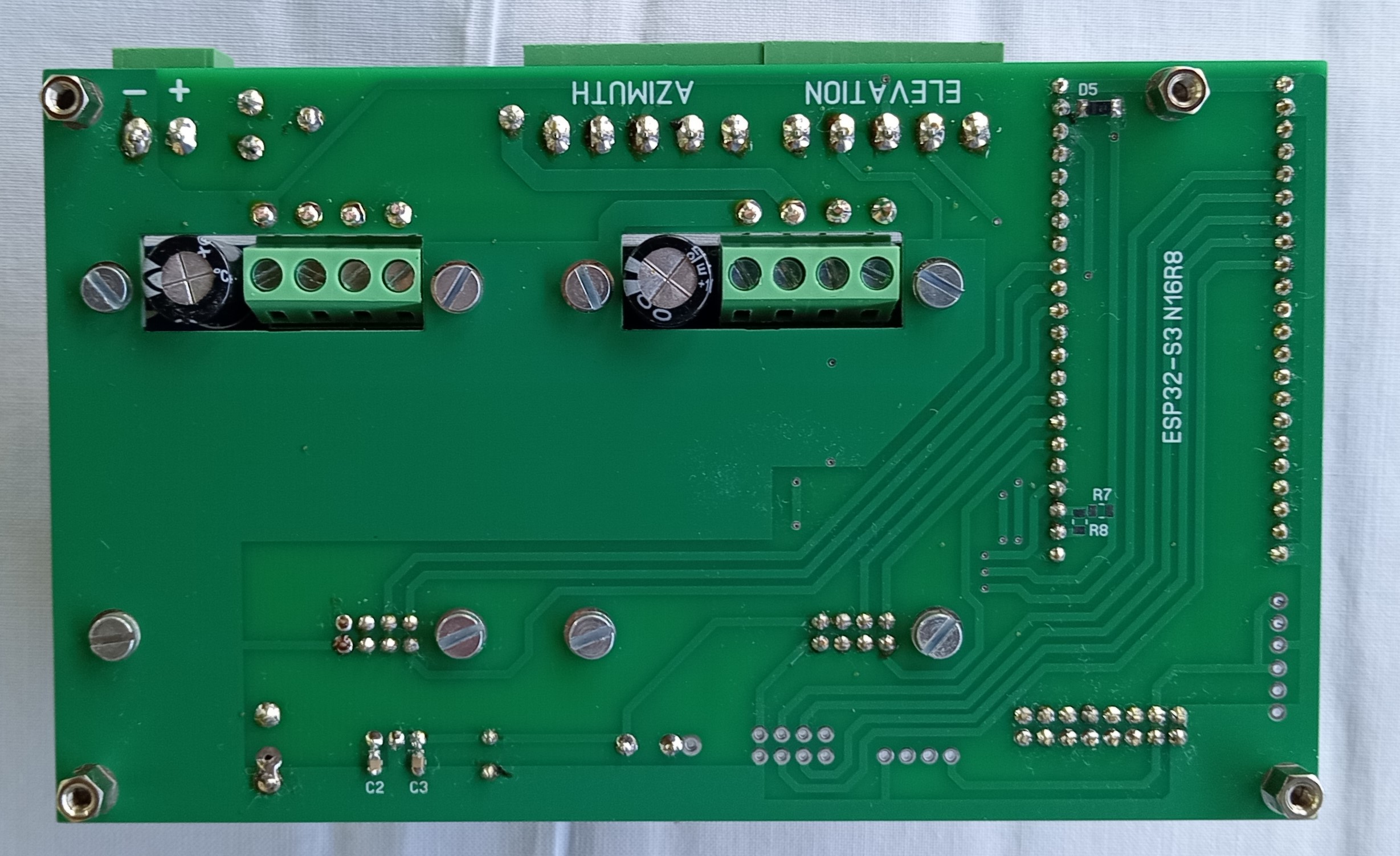
Centrálnym prvkom riadiaceho obvodu je modul typu ESP32-S3 N16R8. Musíme získať modul zobrazený na obrázku, pretože na trhu je aj verzia, kde sú tlačidlá priamo nad konektormi USB. Tento modul je však užší o 2,54 mm, takže sa nezmestí do DPS kvôli umiestneniu pinov. Niektorí výrobcovia predávajú modul s nahratým demo programom, ktorý po zapnutí bliká LED na module. Ak sa vám takýto podarilo zohnať, musíte rozobrať skrat s označením RGB na module. Vedľa RGB LED je ďalšia skratka označená IN-OUT. Toto treba skrátiť! V module beží interpret uPython, ktorý interpretuje a spúšťa kód napísaný v Pythone. Pre zjednodušenie prípravy bol pre riadenie samotného motora použitý hotový modul typu IBT_2. Displej a tlačidlá sú umiestnené na samostatnom malom paneli. Keďže COM pripojenia sú už zastaralé, nebolo by rozumné ho integrovať na DPS, ale v prípade potreby je možné tento modul pripojiť aj samostatne. Na paneli displeja je 5 tlačidiel. Ich funkcia závisí od aktuálnej situácie. Funkcia ktorého tlačidla je uvedená v spodnom riadku displeja. Ak je aktívne horizontálne aj vertikálne otáčanie, potom zľava doprava: anténa dole, anténa hore, stop alebo menu, anténa doľava (proti smeru hodinových ručičiek), anténa doprava (v smere hodinových ručičiek). Ak je aktívna iba horizontálna rotácia, krajné ľavé tlačidlo je otočenie doľava, pravé vzdialené tlačidlo je pravé otočenie, stredné je zastavenie. Druhé a štvrté tlačidlo nemá žiadnu funkciu.
Použitie nasledujúcich funkcií je len pre pohodlie a nemá vplyv na hlavné funkcie ovládača. Ich inštalácia nie je absolútne nevyhnutná. Potenciometre P1 a P2 je možné použiť na jednoduchšie otočenie antény do požadovanej polohy, a to nastavením požadovaného smeru potenciometrom, následným stlačením tlačidla SW7 sa anténa pohybuje horizontálne, pri stlačení tlačidla SW8 sa anténa pohybuje vertikálne. na zvolenú pozíciu. Môžeme použiť spoločný potenciometer pre horizontálny a vertikálny smer, alebo samostatný potenciometer pre horizontálny a jeden pre vertikálny smer. Ak je hodnota parametra pot v súbore rotor_s3.cfg 1, predpokladá spoločný potenciometer, ak je hodnota 2, znamená to, že existujú dva samostatné potenciometre. Keďže tento parameter sa počas používania nemení, tento parameter je možné prepísať iba manuálne pomocou textového editora do vyššie uvedeného súboru. Po stlačení tretieho tlačidla (SW9) sa anténa presunie do parkovacej polohy nastavenej v menu. Aby sa potenciometre nemuseli kalibrovať, po stlačení SW10 sa na displeji zobrazí poloha nastavená potenciometrami. Pri otáčaní potenciometrov teda vidíme, kam sa anténa natočí pri stlačení SW7 alebo SW8.
Hlavné príkazy, ktoré možno použiť na otáčanie antény:
Waaa eee - otoč anténu horizontálne na aaa, vertikálne na eee
A - zastaviť horizontálne otáčanie
AZ=aaa - otoč anténu horizontálne na aaa
AZ=aaa EL=eee - otoč anténu horizontálne na aaa, vertikálne na eee
E - zastaviť vertikálne otáčanie
EL=eee - otoč anténu vertikálne do eee
S - zastaví otáčanie
Maaa - otoč anténu vodorovne na aaa
Keee - otoč anténu vertikálne do eee
ML - otoč anténu proti smeru hodinových ručičiek
MR - otoč anténu v smere hodinových ručičiek
MU - otoč anténu nahor
MD - otoč anténu nadol
L - otoč anténu proti smeru hodinových ručičiek
R - otoč anténu v smere hodinových ručičiek
U - otoč anténu nahor
D - otoč anténu nadol
C - aktuálna poloha antény v horizontálnom smere
C2 - aktuálna poloha antény v horizontálnom a vertikálnom smere
B - aktuálna poloha antény vo vertikálnom smere
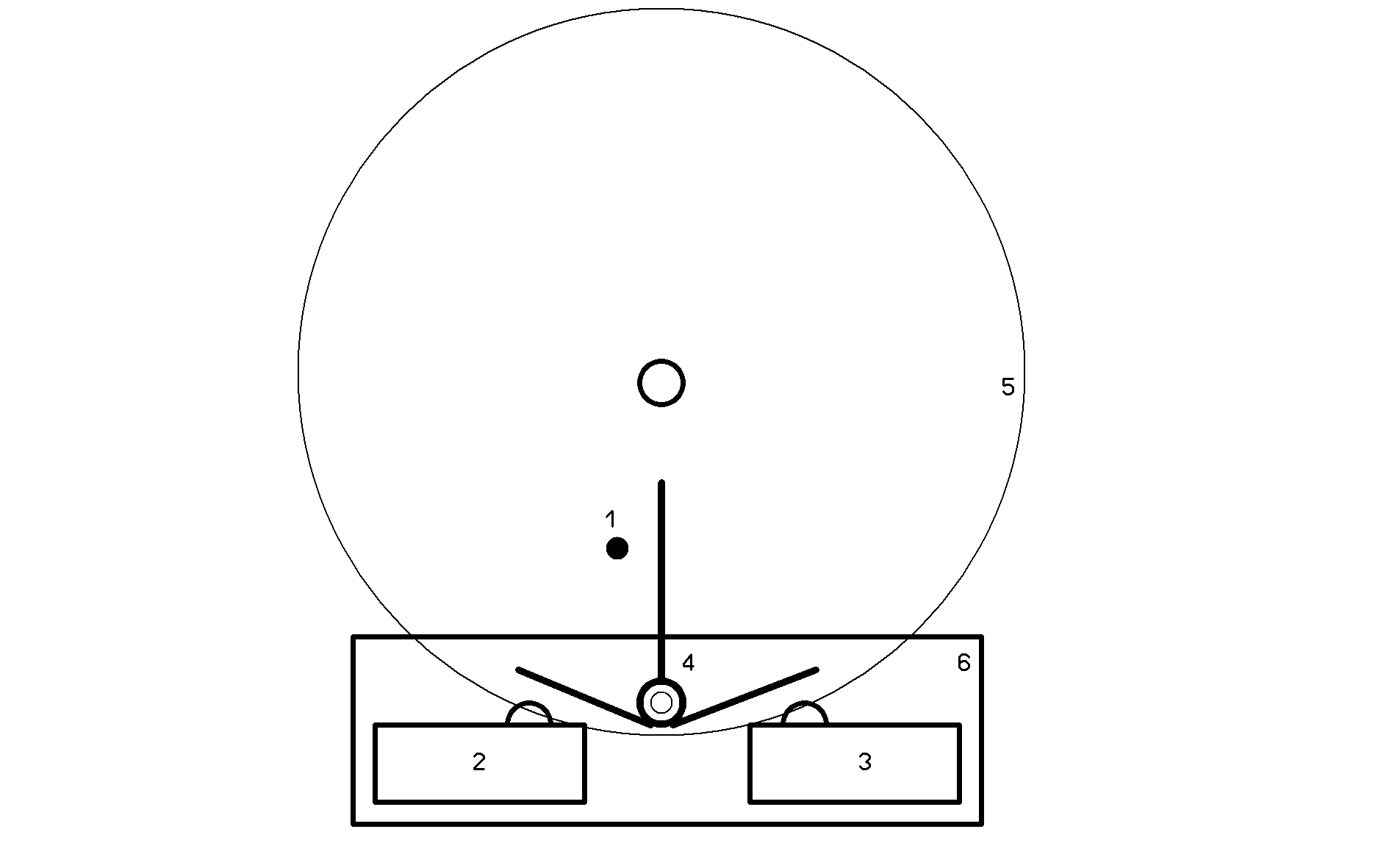
Pre správnu funkciu kalibrácie antény musí byť v otočnom mechanizme zabudovaný koncový spínač, ktorý vo východiskovej polohe zastaví otáčanie v horizontálnom smere. Takýto koncový spínač je pôvodne zabudovaný vertikálne, ale v horizontálnom smere - z pre mňa nepochopiteľných dôvodov - neexistuje, takže si ho musíme vyrobiť sami. Nie je to príliš náročné na vyriešenie, ale vyžaduje si to trochu kreativity podľa toho, kto má aké nástroje a koncové spínače k dispozícii. Vo všetkých prípadoch sa uistite, že spínač je aktívny iba v jednom smere. Jedno z možných riešení je znázornené na tomto obrázku. Na tomto obrázku:
{kind=link}
1 - zvislá tyč na ozubenom kolese
2.3 - koncové spínače
4 - páka na spínanie koncových spínačov
5 - ozubené koleso prevodovky
6 - pomocný panel, na ktorom je namontovaný hriadeľ páky a koncové spínače
Výhodou tohto riešenia je, že koncový spínač je v oboch smeroch. Správnym nastavením ramien pák je možné nastaviť požadovaný rozsah otáčania. Anténa by mala byť namontovaná na rotátor tak, aby presah bol na oboch koncoch rovnaký. V tomto prípade hodnota presahu sa zadáva ako hodnota "azimuth offset" v menu.
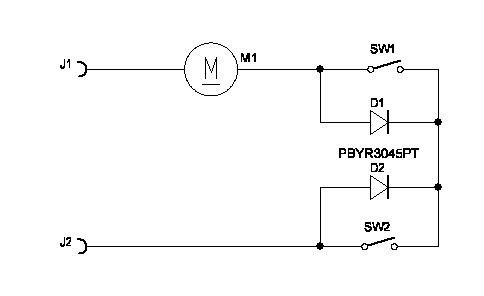
Pripojenie koncového spínača:
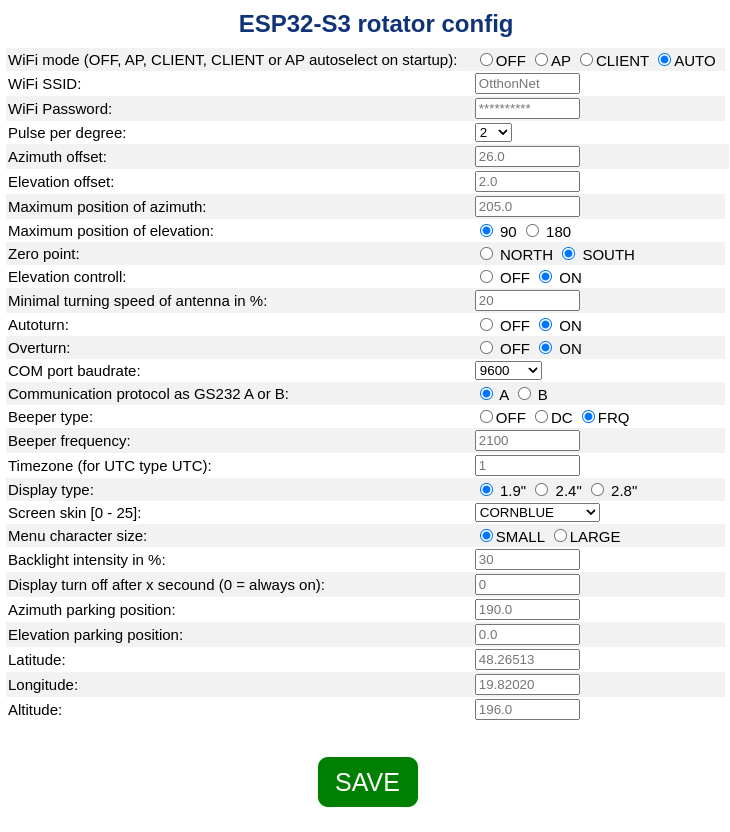
Nastavenie:
Najdôležitejšie parametre sú dostupné v menu. Dostanete sa sem dlhým stlačením stredného tlačidla (STOP). V tomto prípade sa zobrazí viacriadkové menu, v ktorom môžete prechádzať na príslušnú položku menu tlačidlami UP alebo DOWN. Sú to tieto:
AZ turn to: tu môžete nastaviť, kde sa má anténa horizontálne natočiť, keď opustíte menu
EL turn to: tu môžete nastaviť, kde sa má anténa vertikálne natočiť, keď opustíte menu
Pulse/degree: tu môžete nastaviť, koľko impulzov vydá rotátor pri otočení o 1 stupeň
Azim offset: koľko stupňov je nulový bod antény od ľavej koncovej polohy
Elev. offset: koľko stupňov je horizontálna poloha od koncového spínača
Max. azimuth: polohu antény v pravej koncovej polohe
Max. elevation: maximálna povolená výška vertikálneho lúča anténneho systému (90 alebo 180 stupňov)
GS232: A alebo B, v závislosti od toho, ktorý typ emulujete
Beeper type: ak je hodnota OFF, bzučiak je vypnutý, neznie, ak je prijatý príkaz na sériový port, DC - v prípade aktívneho pípača alebo číslo, ktoré predstavuje frekvenciu pípača. Jeho hodnota môže byť medzi 200 a 5000.
Elevation: ON alebo OFF, ak rotátor nie je vhodný na vertikálne otáčanie, nastavte tento parameter na OFF
Overturn: ON alebo OFF, ak anténa umožňuje prevrátenie, tak prepnutím tohto parametra na ON je možné rotátor plynule používať medzi hodnotou nastavenou s horizontálnym posunom a max. azimut. V stave OFF iba medzi 0 a 360.
Autoturn: v zapnutom stave, ak je tlačidlo CW, CCW, UP alebo DOWN stlačené na 5 sekúnd, potom po uvoľnení tlačidla sa anténa naďalej otáča, až kým sa nestlačí jedno z tlačidiel znova, alebo kým rotátor nedosiahne koncovú polohu .
Zero point: tento parameter určuje, kde je mechanický nulový bod rotátora, môže to byť juh alebo sever
WiFi: ako sa má WiFi správať pri štarte. Môžete ho vypnúť alebo nastaviť, aby sa pri spustení pokúsil pripojiť k sieti WiFi. Ak sa mu to nepodarí, tak prepne do režimu AP.
Backlight: intenzita podsvietenia
COM baudrate: rýchlosť sériového portu
Menu char.: veľkosť písma menu - väčšie písmená majú lepšiu čitateľnosť, ale menej riadkov, alebo menšie písmená pre viac riadkov viditeľných
Screensaver: v prípade 0 sa vypne (displej svieti nepretržite), v prípade čísla sa displej po nastavených sekundách vypne
Display type: typ displeja, 1.9, 2.4, 2.8 palcov
Minimal turn: Minimálna rýchlosť otáčania rotátora, pri ktorej sa anténa stále spoľahlivo otáča. Pri rozjazde zrýchľuje z tejto rýchlosti na maximálnu rýchlosť, pred zastavením na túto rýchlosť spomalí, aby rotor nebol zasiahnutý silnými nárazmi. Vďaka tomu je pohyb súvislejší aj pri sledovaní satelitu.
Background: farebné kombinácie použité na displeji
Timezone: nastavte si vlastné časové pásmo, ak nechcete vidieť čas v UTC. (Časový rozdiel medzi UTC a zimným časom. Letný čas sa nastavuje automaticky)
Calibrate na kalibráciu polohy rotátora. Vo vodorovnom smere je možné ho použiť len s následnou montážou koncových spínačov, vo zvislom smere je koncový spínač nainštalovaný už z výroby
Ak sú WiFi SSID a heslo správne nastavené, v ľavom hornom rohu okna menu uvidíte získanú IP adresu. Pomocou tejto adresy IP môžete v prehliadači sa pripojiť na stránku nastavenia. Verzia firmvéru je v pravom hornom rohu. V prípade úspešného pripojenia sa v spodnej časti obrazovky zobrazí UTC alebo miestny čas, podľa nastavenia časového pásma.
Webstránka nastavenia:
V pamäti sa nachádza súbor s názvom rotor_s3.cfg. Obsahuje nastavené hodnoty parametrov. Je to textový súbor, ale odporúčam ho upravovať ručne, len ak viete, čo robíte. Manuálna úprava môže byť prínosom pri prvom zadávaní SSID a hesla, ak sa nechceme pripojiť cez AP. Nastavenie SSID a hesla je však možné vykonať oveľa bezpečnejším spôsobom cez sériový port pomocou príkazov { a }. Ak sa ovládač nemôže pripojiť k sieti WiFi a ak táto funkcia nie je zakázaná, vytvorí AP, do ktorého je možné sa dostať buď pomocou SSID: ROTOR-AP alebo s IP adresou 192.168.4.1. V tomto prípade je heslo 1234567890. Ak chcete používať WiFi, skontrolujte v menu, či je WiFi zapnuté. Ak nie, zapnite ho. V tomto prípade je účinné automatické pripojenie (ovládač sa musí reštartovať, pretože nastavenia kontroluje len po zapnutí). Toto nastavenie môžeme zmeniť prostredníctvom webovej stránky.
Tretím spôsobom nastavenia parametrov je odoslanie príslušných príkazov cez sériový port. Zoznam príkazov je možné vypýtať príkazom H alebo h.
Montáž:
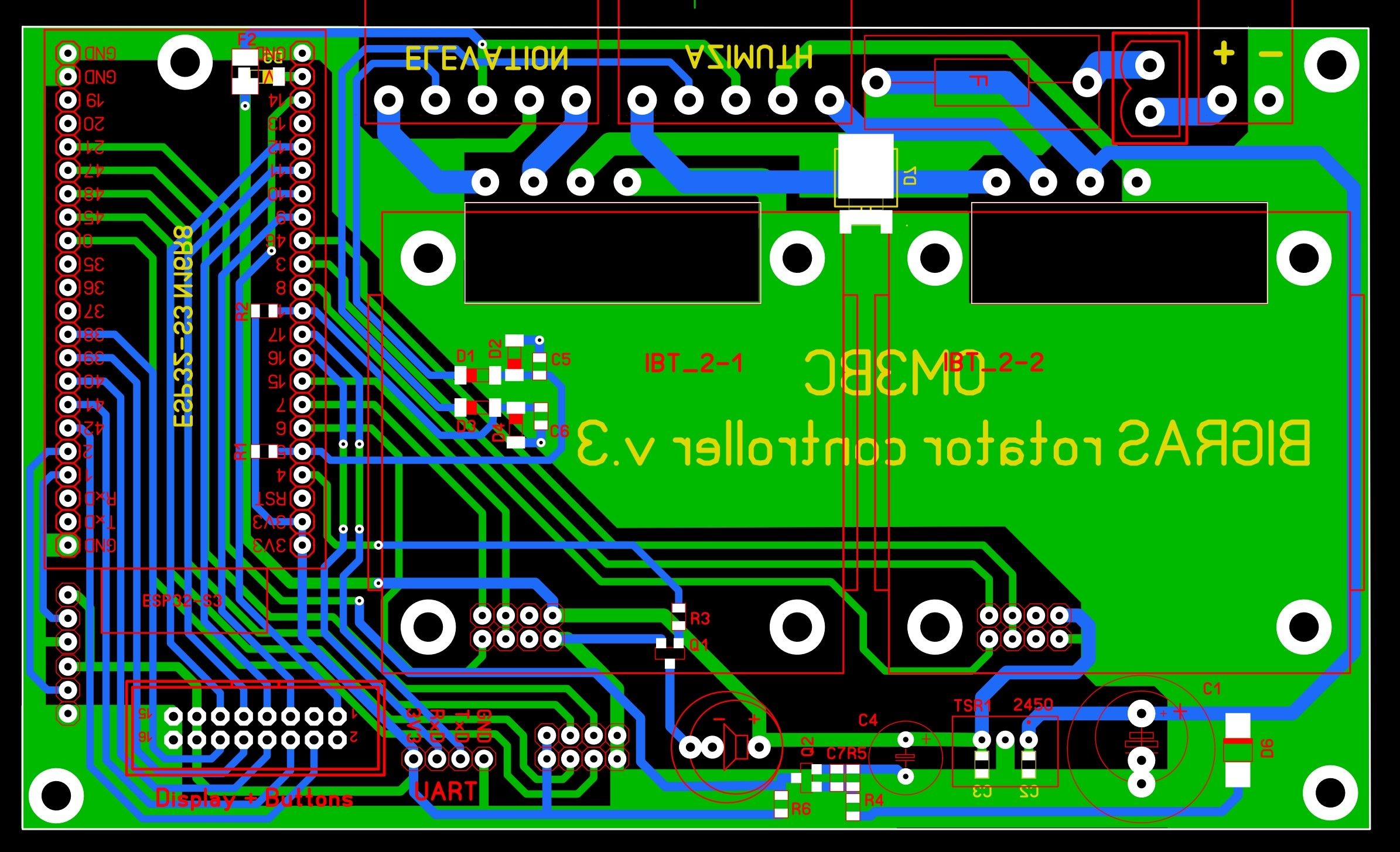
Ako vidíte, PCB je celkom jednoduché. Obsahuje len niekoľko súčiastkov a konektory. Ani s obstaraním dielov by nemal byť väčší problém, pretože hodnota každého rezistora je 10k a keramických kondenzátorov 100nF. Ich veľkosť je 0805. Okrem zenerovej a ochrannej diódy sú všetky diódy typu shottky.
Displej a tlačidlá sú umiestnené na samostatnom paneli.
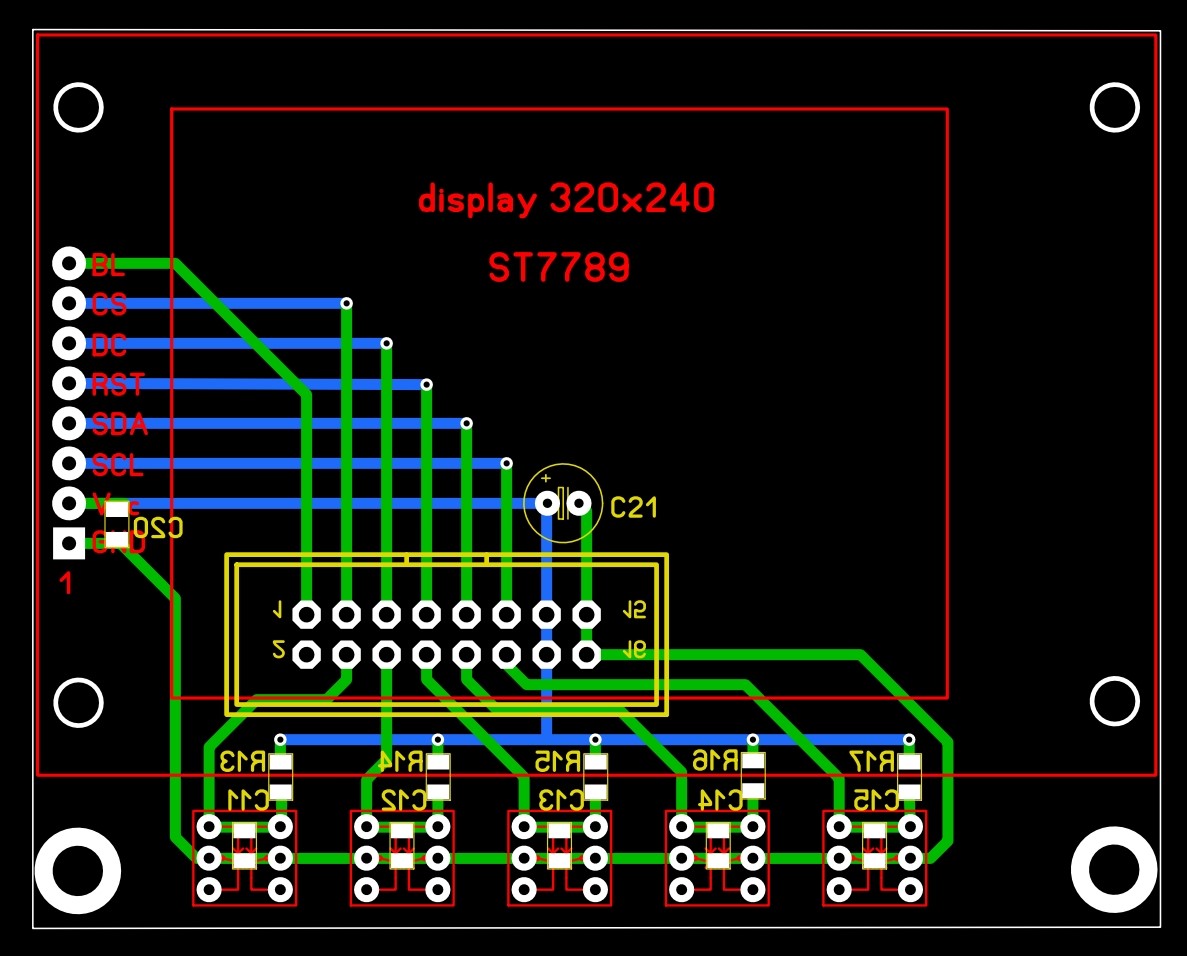
Každá veľkosť displeja má svoj vlastný panel. 1,9-palcový displej má tlačidlá s rozmermi 5,8 x 5,8 mm, zatiaľ čo 2,4- a 2,8-palcový displej má tlačidlá s rozmermi 8,5 x 8,5 mm.
Na výrobu dosiek plošných spojov je možné použiť nasledujúce súbory Gerber:
logika, 1.9displej, 2.4displej, 2.8displej
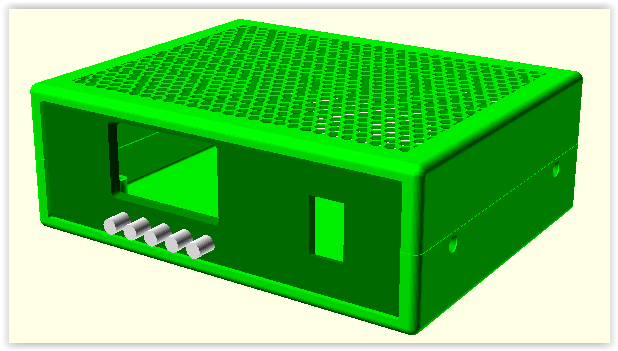
Keďže WiFi anténa je umiestnená na module, ovládač musí byť inštalovaný v plastovej krabici, alebo v kovovej krabici ktorá nie je príliš uzavretá, aby sa WiFi signál dostal von z krabice. Kvôli potrebe chladenia by box aj tak nemal byť príliš uzavretý.
Krabička vyrobená pomocou 3D tlačiarne pre ovládač s 1,9 , 2,4 , 2,8 palcovým displejom.
lid_xxh lid_xxv
Napájací zdroj nie je súčasťou ovládača. Ako napájací zdroj zvoľte typ, ktorý odolá náhlym zmenám v odbere prúdu. Používam napájací zdroj 24V 10A ktorý je pôvodne vyrábaný pre napájanie LED diód. Jeho napätie som pomocou trimra upravil na 20V (na minimum, ktoré sa dá nastaviť). Hodnota diódy D6 je kritická. Treba použiť Zenerovu diódu, pri ktorej po vypnutí napájania prejde port ESP32 - 21 (prerušenie) včas do stavu LOG0, aby mal procesor dostatok času na uloženie aktuálnej polohy, ale kolísanie napätia, ktoré nastáva pri štarte motorov (odber može byť aj 10A) neaktivoval prerušenie. To do značnej miery závisí od kvality napájacieho zdroja.
Inštalácia:
Ak už máte skúsenosti s používaním micropythonu a modulu ESP, mali by ste obsah programového balíka naplniť do modulu tak, ako ste zvyknutí.
Ak nemáte žiadne skúsenosti alebo modul ESP32 používate prvýkrát, postupujte podľa pokynov nižšie.
1. stiahnite si program s názvom Thonny do príslušného operačného systému (odporúčam použiť Windows).
2. vytvorte ľubovoľný adresár, do ktorého skopírujete nasledujúci firmvér.
Extrahujte obsah balíka firmvéru do nového adresára, napr. ROTOR.
Vstúpte do knižnice.
Pripojte modul ESP k počítaču pomocou kábla USB. V systéme Windows skontrolujte číslo portu priradené ESP v ponuke "Správca zariadení". Ak systém nerozpozná modul, nainštalujte nasledujúci ovládač CH343SER.
Prvá možnosť:
Windows:
otvorte súbor install_upython.bat
opravte číslo portu (musí byť nainštalovaný python3)
uložiť súbor
spustite súbor bat
Linux:
spustite súbor sh: bash install_upython.sh
Druhá možnosť:
Stiahni program k nahrávaniu uPythonu a samotný uPython program
Keď spustíme nahrávací program, zobrazí sa okno, ako je toto:
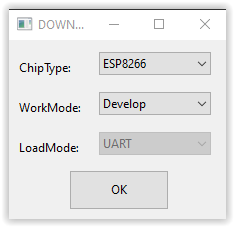
Tu vyberte v prvom riadku ESP-S3:
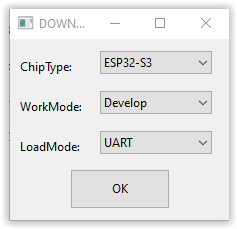
Po stlačení OK sa zobrazí samotný program:
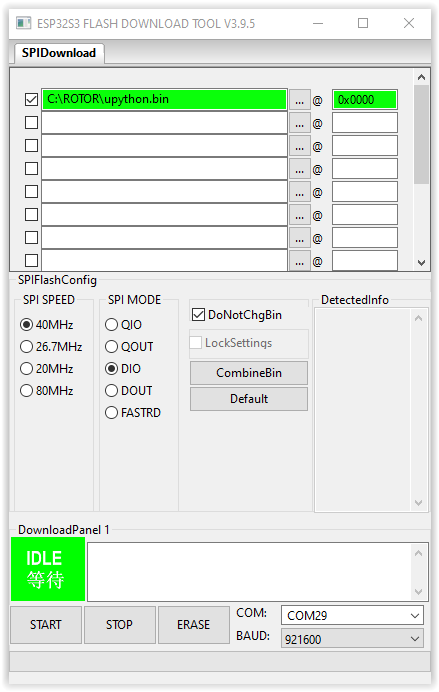
Pomocou tlačidla ... načítajte súbor bin, nastavte číslo portu COM na číslo, ktoré ESP dostal. Prvým krokom je vymazanie obsahu ESP pamäte tlačidlom ERASE. Keď je to hotové (chvíľu to potrvá), načítajte uPython do ESP stlačením tlačidla ŠTART. Ak bola aj táto operácia úspešná, najťažšie časti už máme za sebou.
Teraz môžeme začať Thonny. V ponuke Nástroje - Možnosti nastavte nasledovné:
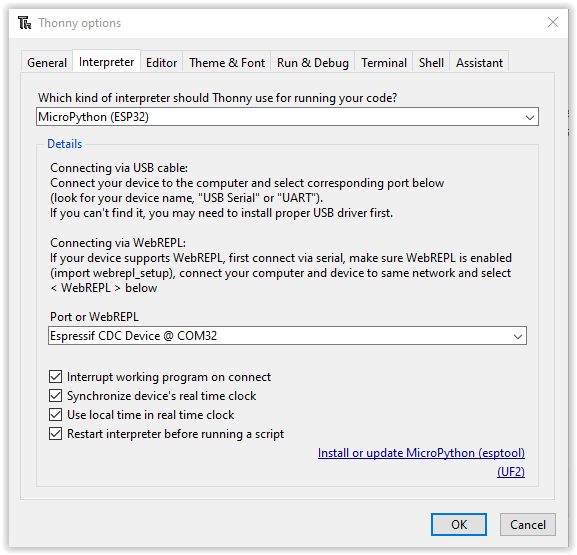
Samozrejme pri druhej možnosti treba zadať číslo portu vlastného modulu.
V ponuke Zobraziť vyberte položku Súbory. Potom sa na ľavej strane zobrazí zjednodušený správca súborov. V hornej polovici zadajte adresár, kde je firmvér. Súbory v hornom okne by sa mali jeden po druhom skopírovať do dolného okna (kliknutie pravým tlačidlom - Nahrať do /). Uistite sa, že fonty v adresári fonts musia byť zahrnuté aj v ESP v adresári fonts. Kliknutím pravým tlačidlom myši Nahrať do / je možné naraz skopírovať celú knižnicu fonts.
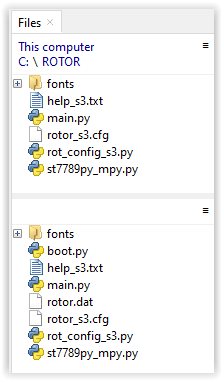
Táto operácia dokončí inštaláciu firmvéru. Žiaľ, stalo sa mi, že sa pri kopírovaní poškodil obsah súboru. Ak sa pri názve súboru nezobrazuje ikona zobrazená na obrázku, je potrebné kopírovanie zopakovať. Súbor "rotor.dat" ešte mať nebudete. Ten sa vytvorí až po zapnutí kontroléra.
zoznam súčiastkov
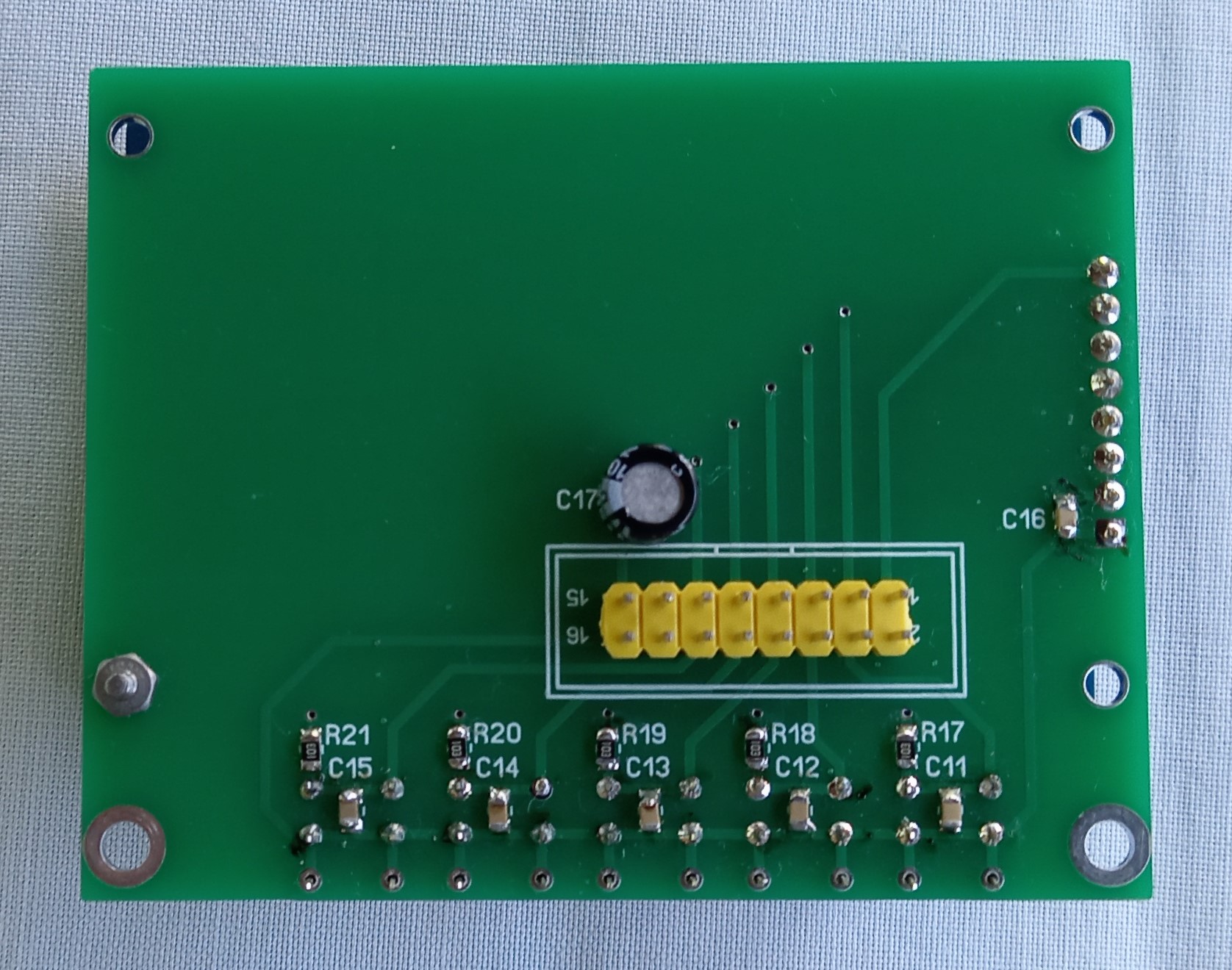
Pripravená je aj verzia pre 4-palcový dotykový displej:

To, čo bolo doteraz popísané, platí aj pre túto verziu. Rozdiel je v tom, že musí byť nainštalovaný aj ovládač dotykového snímača (ft6x36.py). Firmvér nie je kompatibilný so starým, takže súbory v firmware_96.zip musia byť nainštalované na ESP32. Spôsob prepojenia riadiacej dosky a displeja nájdete v connector.txt. Keďže tu nie sú žiadne tlačidlá, pre displej nie je potrebný žiadny samostatný panel, stačí správne pripojiť kolíky konektorov, alebo vytvorte medzidosku podľa obrázka nižšie. Pre rýchle nastavenie môžeme v tejto verzii použiť aj potenciometer(y). Ak existuje ovládanie elevácie, dotykom stredu kruhu azimutu sa zobrazí poloha potenciometra namiesto azimutu a elevácie. Aktuálnu polohu potenciometra azimutu zobrazuje aj bod mimo kružnice azimutu. Dotykom na pole azimutu sa anténa otočí do polohy určenej potenciometrom azimutu. Ak sa dotknete poľa elevácie, elevácia sa otočí v smere určenom potenciometrom. Ak sa riadenie používa iba na horizontálne otáčanie, aktuálna poloha potenciometra je neustále viditeľná v poli elevácie. V tomto prípade sa musíte dotknúť tohto poľa, aby ste otočili anténu v požadovanej polohy. Ak nepoužijeme potenciometer, bod mimo kružnice azimutu ukazuje polohu danú externým príkazom (kam sa má anténa otočiť).
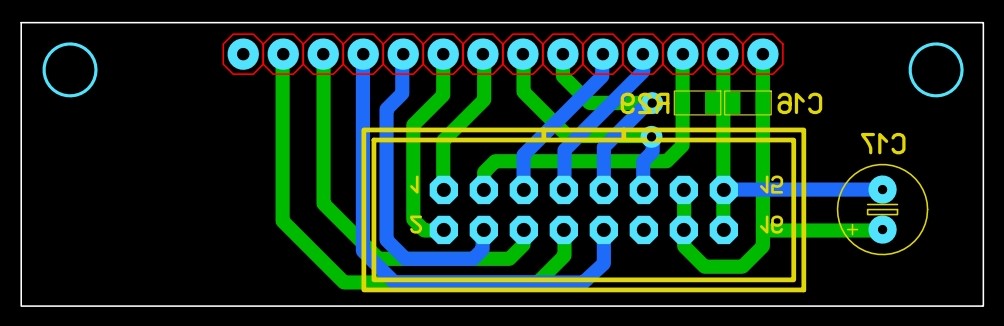
Ak dávate prednosť skutočným tlačidlám (prípadne máte displej bez dotykového snímača), alebo dotykový displej ruší rádiová frekvencia (kapacitné snímače na to sú žiaľ náchylné ), môžete použiť aj tlačidlá. Túto DPS môžeme použiť pre tento typ:
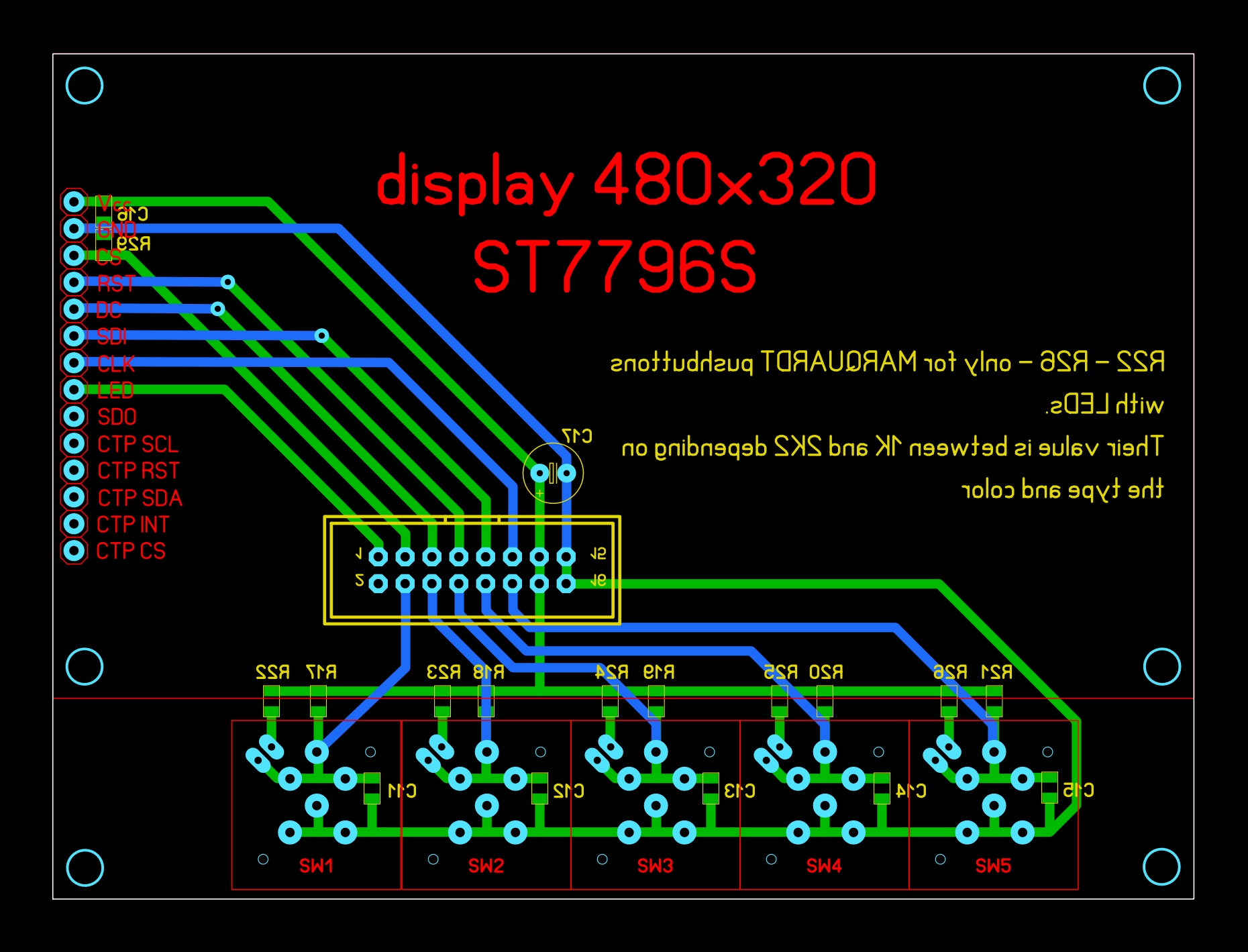
Používajú sa tu tlačidlá typu MARQUARDT. Tie sa ovládajú oveľa príjemnejšie, reagujú jemne a spoľahlivo. Môžeme použiť tlačidlá s alebo bez LED.
Gerber súbor na výrobu DPS: display40
Univerzálny firmvér, možno ho použiť pre tlačidlové aj dotykové displeje.
Možnosti nákupu dielov:
ESP32 modul
Ovládač motora
UART-COM konvertor úrovní
1.9" displej
2.4" displej
2.8" displej
stabilizátor
spínače
pípač
jednoradová zásuvka
konektor plochého kábla
zásuvkový konektor
hlavný spínač 15x21
napájací zdroj alebo tu
zelené konektory alebo tu
alebo
PV05-5.08-H-P EUROCLAMP
PV02-5.08-H-P EUROCLAMP
PV02-5.08-V-P EUROCLAMP
SH05-5.08 EUROCLAMP
SH02-5.08 EUROCLAMP
MARQUARDT hmatnik
Na ovládanie antény bol vytvorený aj sledovací program, ktorý nájdete na tejto adrese. Pomocou tohto programu je možné automaticky sledovať niekoľko satelitov.
Výkresy a program v procesore sú duševným vlastníctvom autora. Jeho komerčné využitie je povolené len s písomným súhlasom autora!