Hľadanie meteorologických sond s RaspberryPi
Pomerne často sa stáva, že pri hľadaní sond nemáme
dostatočne presnú pozíciu, preto v blízkosti dopadu potrebujeme
prijímať sondu a upresniť pozíciu. Môže nastať aj situácia, že sondu
potrebujeme dohľadávať podľa síly signálu (metódou "hon na líšku").
V takýchto prípadoch nám môže poslúžiť tento malý program, ktorý
obsahuje spektrálny analyzátor s dekodérom. K používaniu budeme
potrebovať RaspberryPi s dotykovým displejom a rtl-sdr prijímač.
Pretože program sa ovláda dotykovým displejom, nepotrebujeme ani
klavesnicu, ani myš. Ako anténu, doporučujem používat anténu typu
HB9CV. Táto anténa má dostatočne malé rozmery, aby sa to dalo používať
v teréne a je vhodná na dekódovanie, ako aj na hľadanie.

Inštalácia:
Ako prvý krok potrebujeme nainštalovať operačný
systém a ovládače pre daný dotykový displej. Ak už všetko funguje
správne, tak môžeme pristúpiť k nainštalovaniu samotného programu.
Ak na počítači máme nový operačný systém, ktorý
sme inštalovali teraz, tak inštalátor môžeme stiahnuť tak, že do
príkazového riadku (konzola) napíšeme tento riadok:
sudo wget www.om3bc.com/docs/SF/install_all.sh
tento príkaz stiahne inštalačný program, a uloží ho do aktuálneho adresára. Teraz spustíme inštaláciu:
sudo chmod a+x install_all.sh
./install_all.sh
ak všetko bude v poriadku, tak tento inštalačný program nainštaluje okrem samotného programu všetky potrebné knižnice a doplnky.
Keď inštalácia z nejakého dôvodu neprebehne úspešne, tak môžeme
skúsiť programový balík nainštalovať ručne. Možno sa nám podarí zistiť
príčinu poruchy.
sudo apt-get install cmake build-essential python-pip libusb-1.0-0-dev python-numpy git pandoc -y
sudo apt-get remove rtl-sdr -y
sudo apt-get install git-core libusb-1.0-0-dev pkg-config cmake -y
git clone https://github.com/keenerd/rtl-sdr
cd rtl-sdr/
mkdir build
cd build
cmake ../ -DINSTALL_UDEV_RULES=ON -DDETACH_KERNEL_DRIVER=ON
make
sudo make install
sudo ldconfig
sudo apt-get install sox
sudo pip install pyrtlsdr
mkdir /home/pi/SondeFinder
cd /home/pi/SondeFinder
sudo wget www.om3bc.com/docs/SF/sondefinder.tar.gz
tar -zxf sondefinder.tar.gz
sudo rm sondefinder.tar.gz
cd Desktop
cp sondefinder.desktop /home/pi/Desktop
cd ..
Ak program už raz bol nainštalovaný a chceme ho len aktualizovať, tak napíšeme:
./install_prg.sh
alebo ručne:
cd /home/pi/SondeFinder
sudo wget www.om3bc.com/docs/SF/sondefinder.tar.gz
tar -zxf sondefinder.tar.gz
sudo rm sondefinder.tar.gz
Nastavenie - užívanie:
Keď inštalácia bola kompletná, tak na obrazovke uvidíme ikonku SondeFinder. Program spustíme touto ikonkou.
Ak pri spúšťaní vyskytne promlém (program sa nerozbehne), tak môže program spustiť z príkazového riadku:
cd /home/pi/SondeFinder/
python sondefinder.py
Bez pripojeného prijímača program nerozbehne!
Po spustení sa nám objavý spektrálny analyzátor.
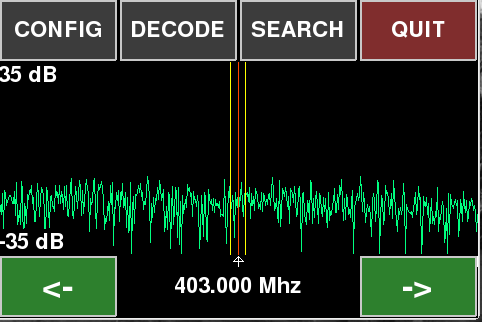
Tento prevádzkový mód budeme používať na hľadanie, alebo na zistenie smeru sondy. Keď anténu natočíme do smeru najsilnejšieho signálu, tak dekódovanie bude spoľahlivejšie.
Keď potrebujeme meniť parametre, tak stlačíme CONFIG:
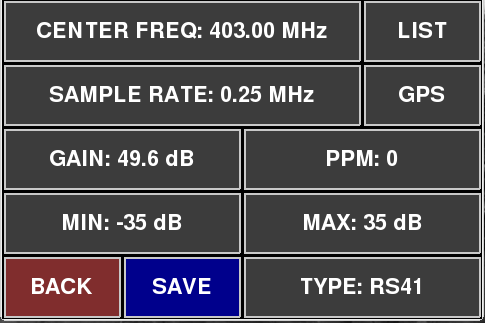
Tu môžeme nastaviť prijímaný a vzorkovací kmitočet, citivosť,
korrekciu kmitočtu, spodnú a hornú hranicu spektrálneho analyzátora ako
aj typ sondy.
Ak
toto okno opustíte tlačidlom BACK, nastavené hodnoty sa neuložia. Ak je
zvolené tlačidlo SAVE, nastavené parametre sa uložia a budú platné pri
ďalšom zapnutí zariadenia. Parametre sú uložené v súbore „device.cfg“.
Posledný riadok tohto súboru obsahuje parameter 'debug'. Ak sa táto
hodnota zmení na ON, prijaté dáta sa budú priebežne zapisovať do okna
terminálu ako pre sondu, tak aj pre GPS.
Keď hľadáme sondu podľa síly signálu (metóda "hon na
líšku"), tak pre lepšiu presnosť citlivosť postupne znižujeme (v
blizkosti sondy) až na nulu. Na displeji sa objaví najblišia hodnota, ktorú prijímač akceptuje (v našom prípade 49.6dB).
Kmitočet sa dá napísať ručne, alebo to vyberte zo zoznamu
tlačítkom LIST. Zoznam je v súbore "frequency.lst", ktorý je možné
upraviť pomocou textového editora. Prvým údajom v riadku je
identifikátor miesta vypúšťania, druhý je frekvencia v MHz a tretí je typ sondy. Riadky
začínajúce "#" sú ignorované.
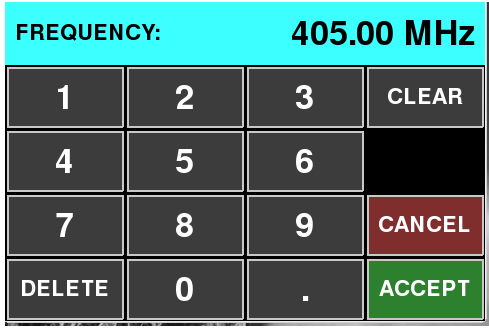
So stlačením CLEAR nulujeme parameter, a s DELETE vymažeme posledný
charakter. Vrátiť sa môžeme s CANCEL (v tomto prípade nový údaj sa
stratí a zostane v platnosti predchádzajúci), alebo s ACCEPT (v tomto
prípade bude platiť nový údaj). Podobným spôsobom môžeme nastaviť aj
ostatné parametre.
Pri dekódovaní doporučujem nastaviť maximálnu citlivosť (50dB alebo AUTO).
Keď sme všetko nastavili správne, na analyzátore musíme vidieť signál zo sondy.
Program dokáže dekódovať sondy: RS41, DFM09, DFM17, PS15, PilotSonde, M10, M20, MP3H1 a iMet.
Pretože program
väčšinou budeme používať v teréne kde nie je dostupný internet, preto
program neobsahuje dekóder pre RS92 (nebol by k dispozícii dostatočne
čerstvý almanach alebo ephemeris). Nezôstane nám iná možnosť, ako
RS92-ky hľadať podľa síly signálu. Pretože program neobsahuje AFC, môže
sa stať, že skutočný kmitočet pre DFM, PilotSonde a M10 musíme nastaviť
ručne.
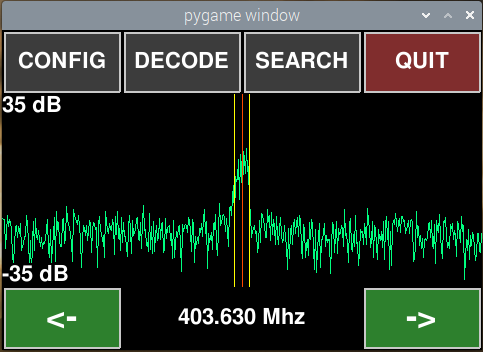
Na to slúžia tlačidlá < a >. V prípade PilotSondy, tento rozdiel
môže byť až 30-40 kHz. Signál musí byť symetricky umiestnený medzi
žltými čiarami. Hoci
frekvencia je vypísaná len na 3 desatinné miesta, v CONFIGu môže byť
zadaná aj s
presnosťou 1 Hz (6 desatinných miest). Keď ťukneme na stred obrazovky,
tak zmiznú všetky informacie, a zôstane len kryvka spektrálneho
analyzátora. Je to výhodné pri hľadaní podľa síly signálu.
Ak signál je dostatočne silný, tak môžeme pristúpiť k dekódovaniu polohy:
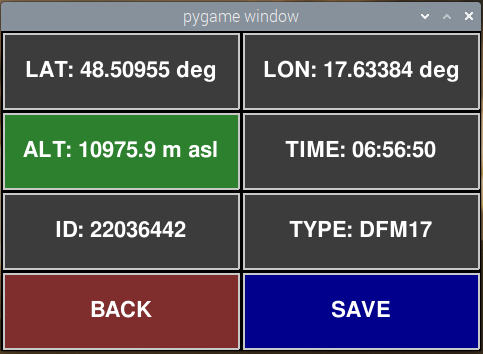
Údaje sa obnovujú po každom bezchybnom balíka dát zo sondy. Po
stlačení BACK alebo SAVE niekedy musíme počkať pár sekúnd aby príkaz
bol vykonaný. Aktuálnu polohu môžeme uložiť
pomocou tlačidla SAVE. Ak namiesto SAVE vidíme WAIT s červeným pozadím,
znamená to, že
zatiaľ nie sú platné údaje. Pri sondách DFM na príjem identifikátora
sondy treba čakať 10 až 15 sekúnd. Názov vytvoreného súboru je
identifikátor sondy.
Po uložení polohy sa pozadie tlačidla SAVE zmení na olivovú.
Ak pripojíte prijímač GPS s portom USB na Raspberry (alebo bežný
prijímač GPS so sériovým portom s prevodníkom USB-COM), môžeme
vyhľadávanie uľahčiť. Najskôr by sa mala dekódovať poloha sondy. Je
vhodné uložiť polohu tlačidlom SAVE. Potom opustíme menu dekodéra a
vstúpime do menu SEARCH. V tomto prípade uvidíme túto obrazovku:
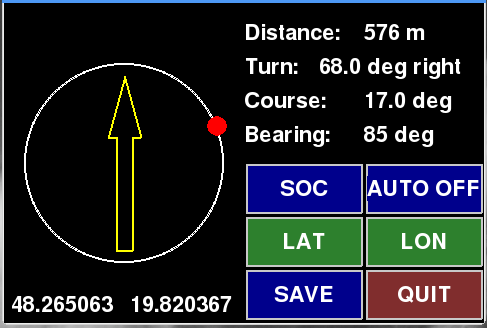
Ak sme predtým dekódovali polohu sondy a prijímač GPS vidí dostatok
satelitu na určenie našej polohy, vyhľadávanie môže začať. V tomto
prevádzkovom móde funguje prijímač GPS, ale aj sondy. Takto môžeme
sledovať aj sondu ktorá ešte letí. Žltá šípka
ukazuje smer nášho pohybu a červený bod ukazuje smer, kdorým by sme
mali ísť k sonde. Vždy držte červenú bodku na špici žltej šípky.
Tlačidlá LAT a LON možno použiť na manuálne zadanie pozície, ktorú
hľadáme. To môže byť dobré, ak hľadáme sondu, ktorá už nevysiela, ale
poznáme jej presnú polohu. Ak sa po stlačení tlačidla SEARCH nezobrazí
hlavná obrazovka, ale zobrazí sa chybové hlásenie, musí sa opraviť
chyba. Môžu to byť nasledovné: prijímač GPS nie je pripojený k
Raspberry, rýchlosť sériového portu prijímača GPS nie je dobre
nastavená alebo sonda nebola predtým dekódovaná. Keďže nie je vstavaný
kompas, môžeme držať správny smer len ak sa pohybujeme.
Keď stojíme, poloha červenej bodky sa nemení. Bohužiaľ, toto je cena
jednoduchého hardvéru. V ľavom dolnom riadku vidíme našu vlastnú
aktuálnu pozíciu. Našu vlastnú pozíciou môžeme uložiť tlačidlom SOC
(SAVE OWN COORDINATES). Naša pozícia sa potom nachádza v súbore s
názvom mycoordinates.txt. Pravidelné zálohovanie môžete zapnúť
tlačidlom AUTO. V takom prípade sa naša vlastná poloha ukladá
každých 30 sekúnd, ktorú potom môžeme analyzovať a vykresliť cestu,
ktorú sme prešli. Tlačidlo SOC vymaže starý súbor mycoordinates.txt, a
otvorý nový. AUTO starý súbor mycoordinates.txt nevymaže. Keď chceme
zachovať starú trasu, nepoužívajme SOC, len AUTO.
Dostupnosť:
obrazový súbor SD karty
image pre RPi2, RPi3 a RPi4.
default display je štandardný HDMI. Na 3,5 palcový môžeš prepnúť:
cd ~/LCD-show/
sudo ./LCD35-show
zpäť na štandardný HDMI:
cd ~/LCD-show/
sudo ./LCD-hdmi
na kalibráciu dotykového snímača napíš do príkazového riadku:
ts_calibrate
kompletný inštalátor pre staršie operačné systámy
kompletný inštalátor pre Bullseye32 a Python3
kompletný inštalátor pre Bullseye64 a Python3
aktualizácia programu staršie operačné systémy
aktualizácia programu pre Bullseye32 a Python3
aktualizácia programu pre Bullseye64 a Python3
program staršie operačné systémy
program pre Bullseye32 a Python3
program pre Bullseye64 a Python3
staršia verzia bez gps prijímača
program, ktorý ma inšpiroval
Program bol testovaný s "home-made" prijímačom (USB-TTL konvertor + L86 GPS prijímač) a tu uvedeným GPS-GLONASS USB prijímačom:
